組み込みシステムの開発で PID 制御を行う仕事が始まりました。
それに伴って、出てくる用語として、
- ボード線図
- 導関数
- PID制御
- インパルス応答、ステップ応答、
- 一次遅れ
これまで聞いたこともない、よく分からない言葉に直面。
高校、大学の時に理工系を勉強してこなかったツケが回ってきた感じです。
ということで、必要に迫られて、自動制御系の本を読み漁っています。
その中でもイチオシの本。特に、PID 制御とボード線図の考え方が頭で分かりやすく、シンプルに書いてる本がこちらでした↓
「絵ときでわかる自動制御」
サクッとボード線図と PID 制御についての概要を知るには本書はお勧めです。
Amazonのレビューが1つも書いてないが不思議。
かなりの良書です。
高橋寛さんは、日本大学理工学部電気工学科卒業。日本大学名誉教授。工学博士
大島輝夫さんは、東電学園高等部卒業。東京電力勤務の方。(出版当時)
山崎靖夫さんは、足利工業大学工学部電気工学科卒業。長門国際特許事務所勤務の方(出版当時)
急いで自動制御系の勉強するのにおススメ「絵ときでわかる自動制御」
では、どんなところが一番役に立ったかメモ書きをしておきます。
ページ72ページ以降のボード線図、積分要素、微分要素についての説明。
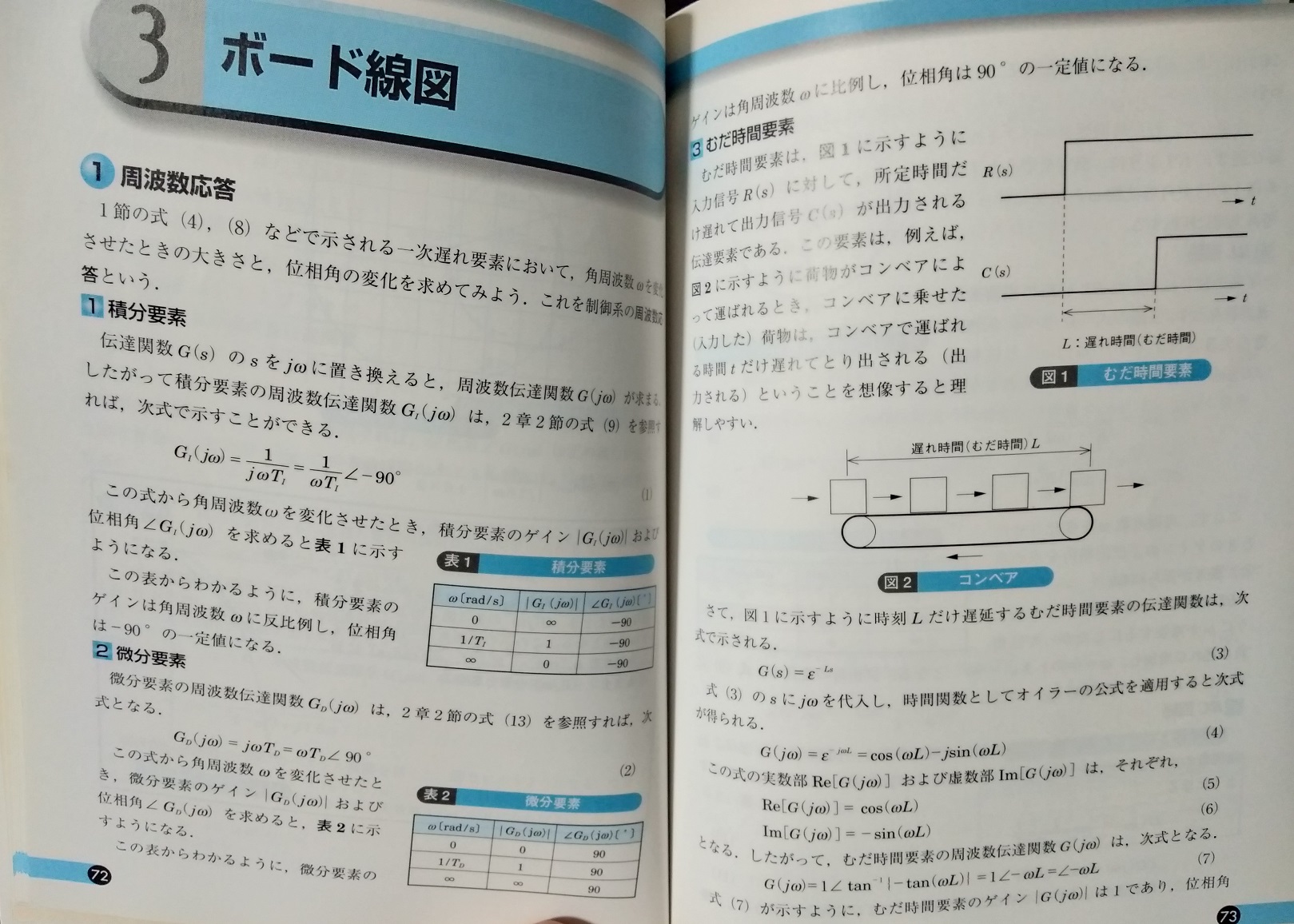
積分要素、微分要素、LとCの位相
分かりやすかった説明が、
- 積分要素は、ゲインは角周波数(ω)に反比例し、位相角は-90°の一定値になる
- 微分要素は、ゲインは角周波数(ω)に比例し、位相角は90°の一定値になる
74ページ、75ページ。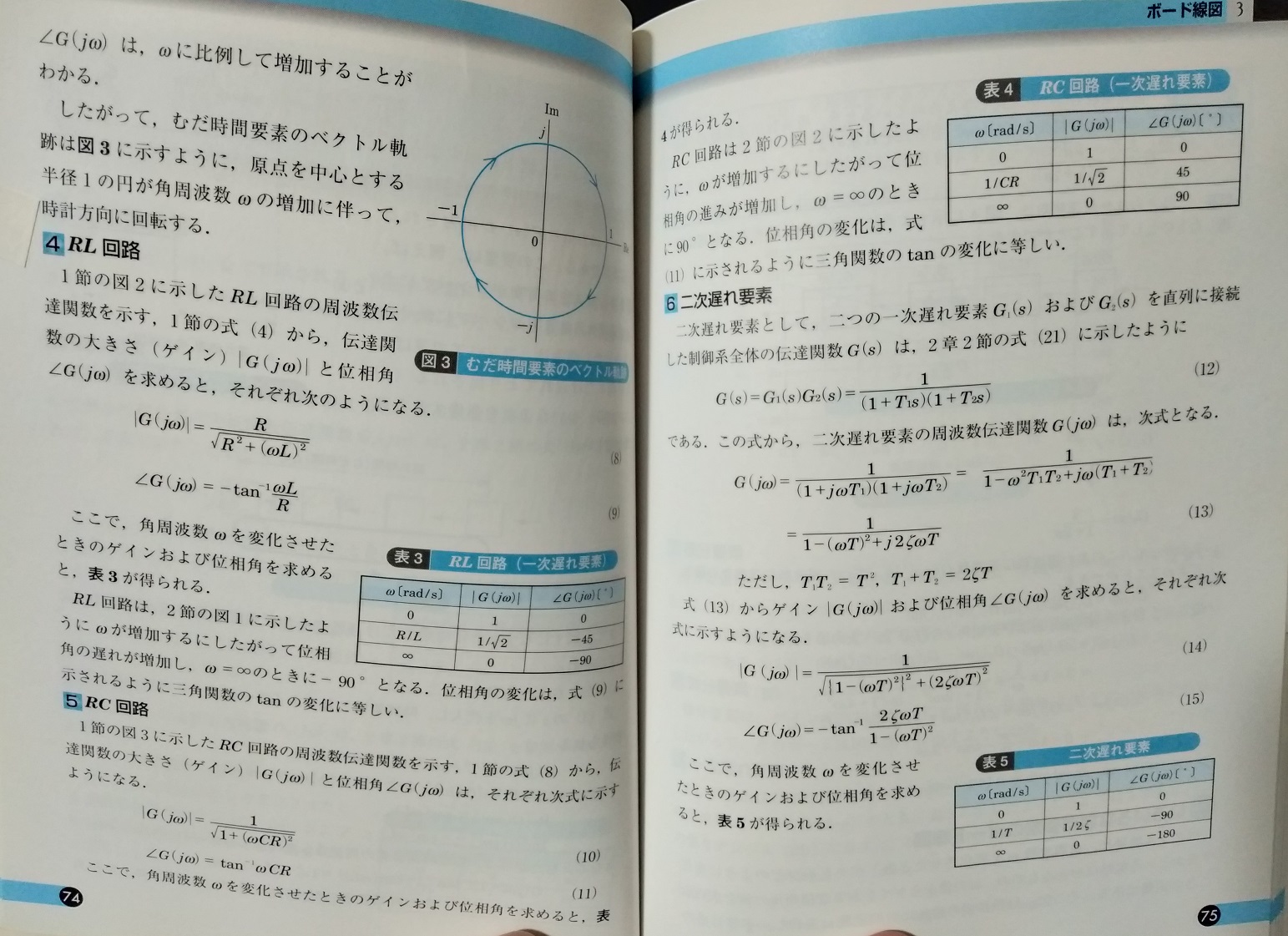
RL 回路の場合、位相が-90°になる(ω=∞の時)
RC 回路は、位相が90°進む(ω=∞の時)
あれあれ?
RL 回路と RC 回路の位相の関係を忘れてしまった時、どう考えればいいか?
忘れた時に思い出すと良いサイトがこちらにありました。リンクを貼らせていただきます。忘れたら私もこちらを見て思い出します。
コイルの場合は、エリー(ELI)と覚える。電圧、コイル、電流の順番。電圧が先、電流が後
コンデンサの場合、アイス(ICE)と覚える。電流、コンデンサ、電圧の順番。電流が先、電圧が後。
この覚え方によって、コイルの場合は電流が90°遅れて出てくる。コンデンサの場合は逆に電圧の方が90°遅れ。
という考えが思い出せると思います。(RL 回路 RC 回路もそのまま適用できる)
微分要素、積分要素、一次遅れ要素のボード線図
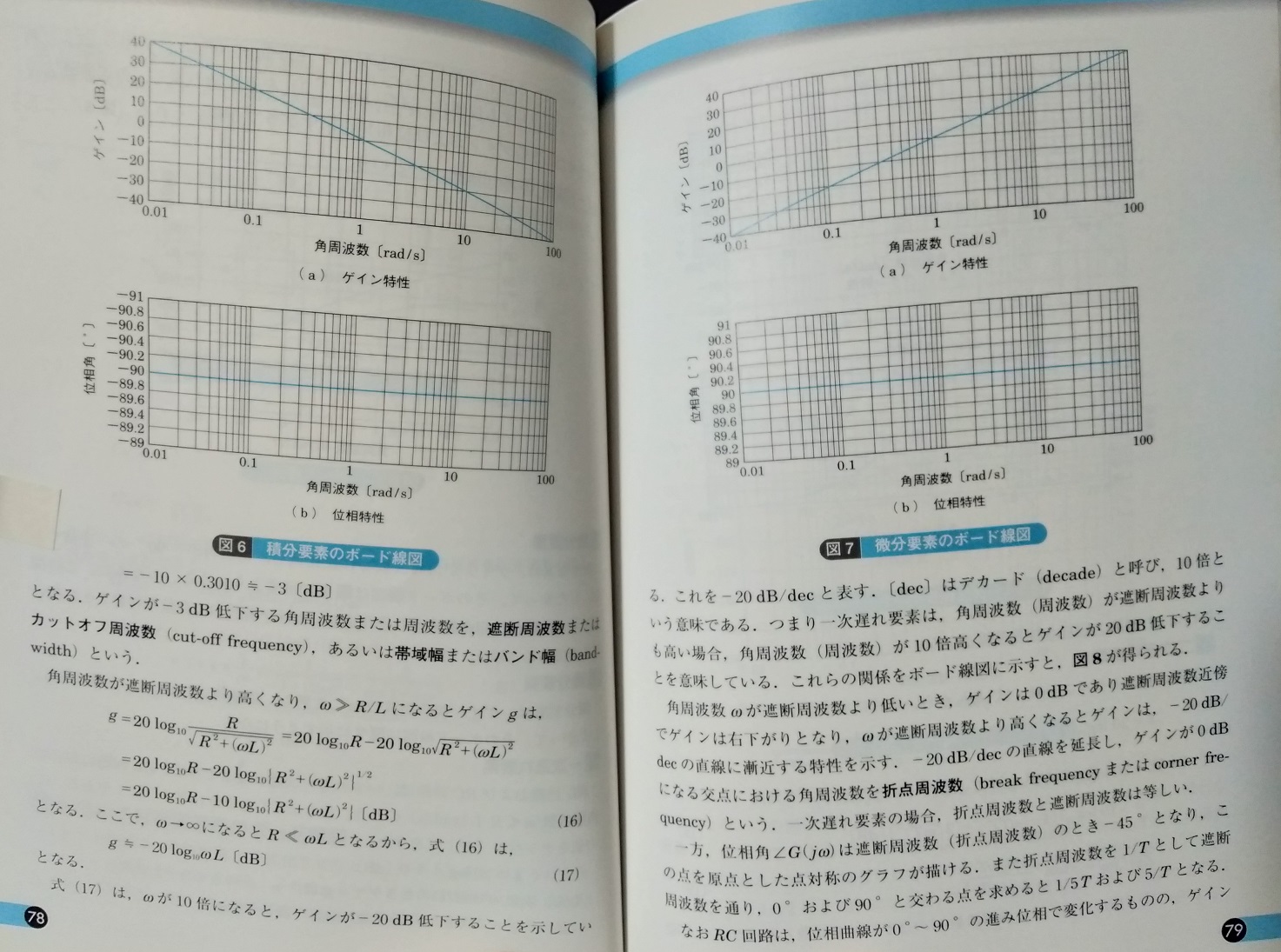
続いて78ページ79ページ。
積分要素のボード線図、微分要素のボード線図が書いてあります。
積分要素のボード線図は、
- 角周波数が上がるにつれてゲインが下がっていく
- 位相角は-90°
- ゲインが0の時に角周波数が1
- ゲインが-20db 下がったところは、角周波数が10倍に上がったところ
一方の微分要素は、
- 角周波数が上がるにつれてゲインが上がっていく
- 角周波数の位相角は90°
- 同様に角周波数が10倍になると、ゲインは20db上がる
このようなイメージが分かります。
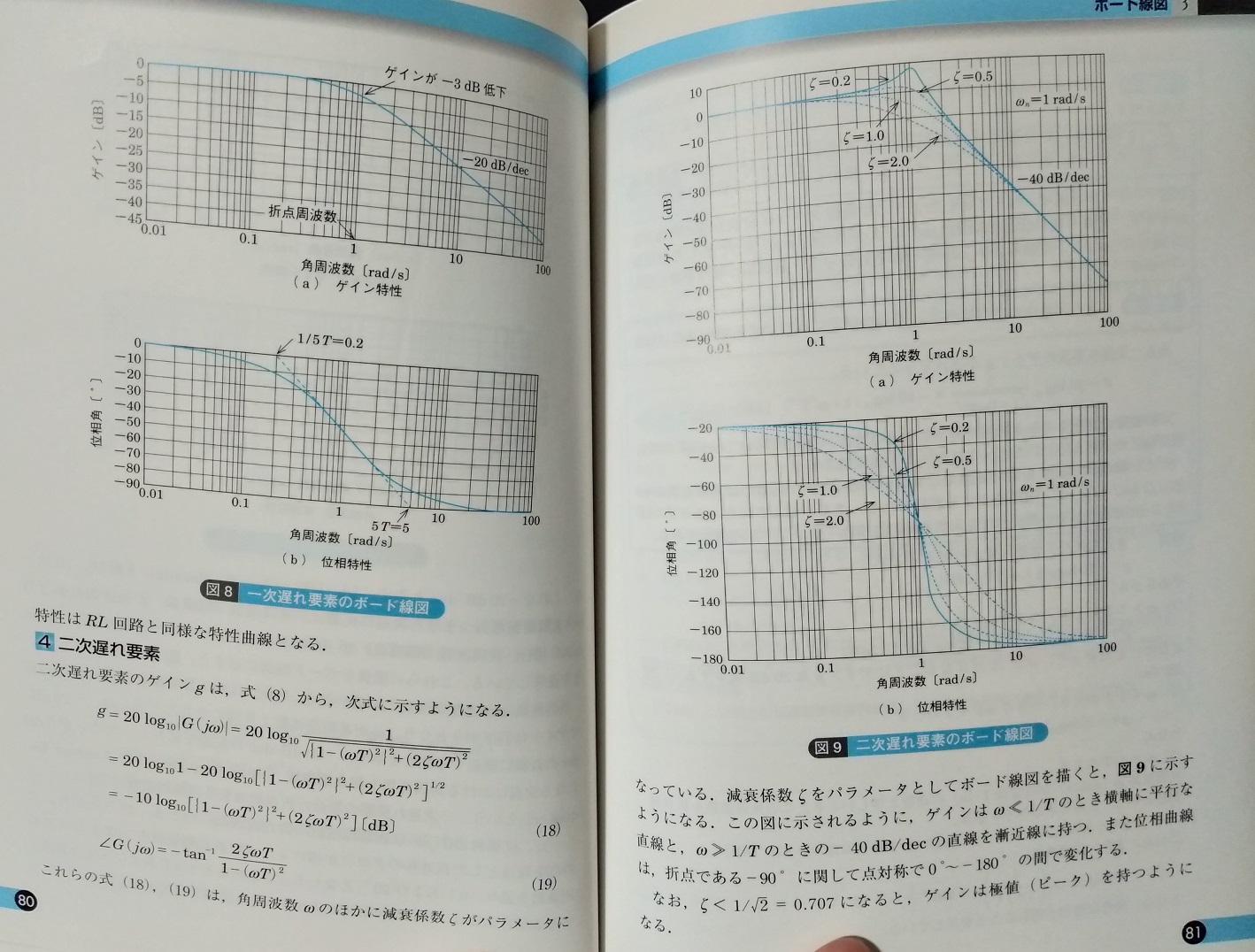
ページ80を読むと、1次遅れ要素についても分かります。
ポイントは、1次遅れ要素は、ゲインが-3dbに低下した後は、
角周波数が10倍になったらゲインがー20dBに変化するということ。
ゲインが-3db 低下するところのポイントを折点周波数という。80ページの図で言うと、角周波数が1rad/sの時のポイント。
ボード線図を用いた安定判別法
次に、ボード線図を用いた安定判別法について。
98ページから100ページにわたって書いています。
ゲイン原因余裕と位相余裕についての説明です。
他の本で、大学の勉強用の教科書通りの説明を読むと難しいのですが、この本の100ページが非常にわかりやすくまとまっています。
引用しておくべき内容。引用します
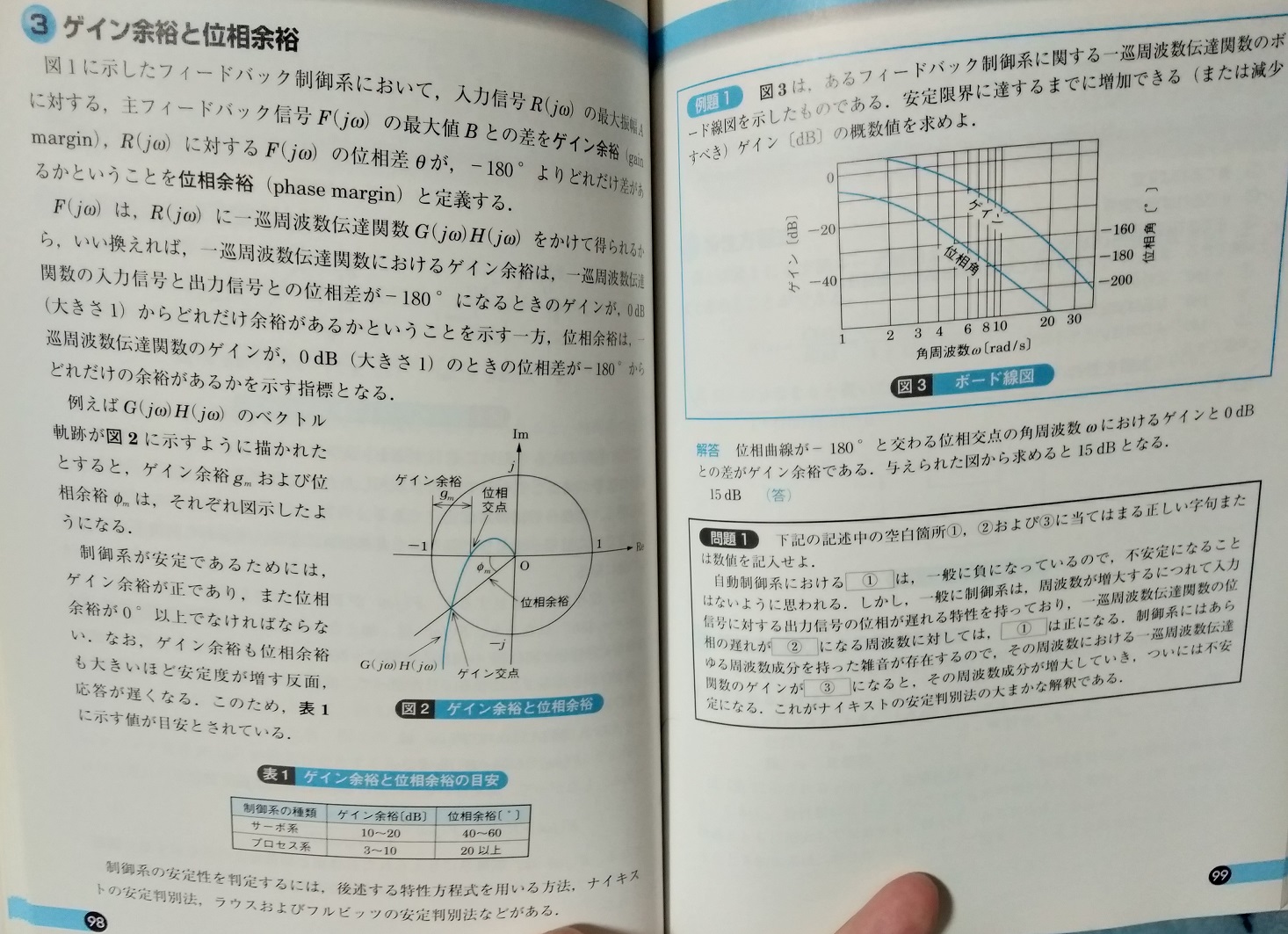
ボード線図を用いた安定判別法ボード線図を使えば制御系のゲイン余裕と位相余裕を簡単に求めることができる。
ボード線図において、位相特性が-180°となる角周波数のゲイン値を求め、この時のゲイン値が、
- 負であれば安定
- 0であれば安定限界
- 正であれば不安定
と判別できる。
また、ゲインが0db となる角周波数の位相特性が、
- -180°より小さい時とき安定
- -180°ならば安定限界
- -180°より大きいとき不安定
と判別できる
ということで、ゲイン余裕と位相余裕の判別方法がわかります。
安定がどうかを判別するときは、
- 位相特性が-180°の時の角周波数のゲインを見る
- ゲインが0db の時の角周波数の位相特性を見る
ってのがポイントですね。
周波数領域(バンド幅と制御系の応答性)
次に分かりやすくてメモした箇所。128ページの周波数領域の話。
引用した箇所
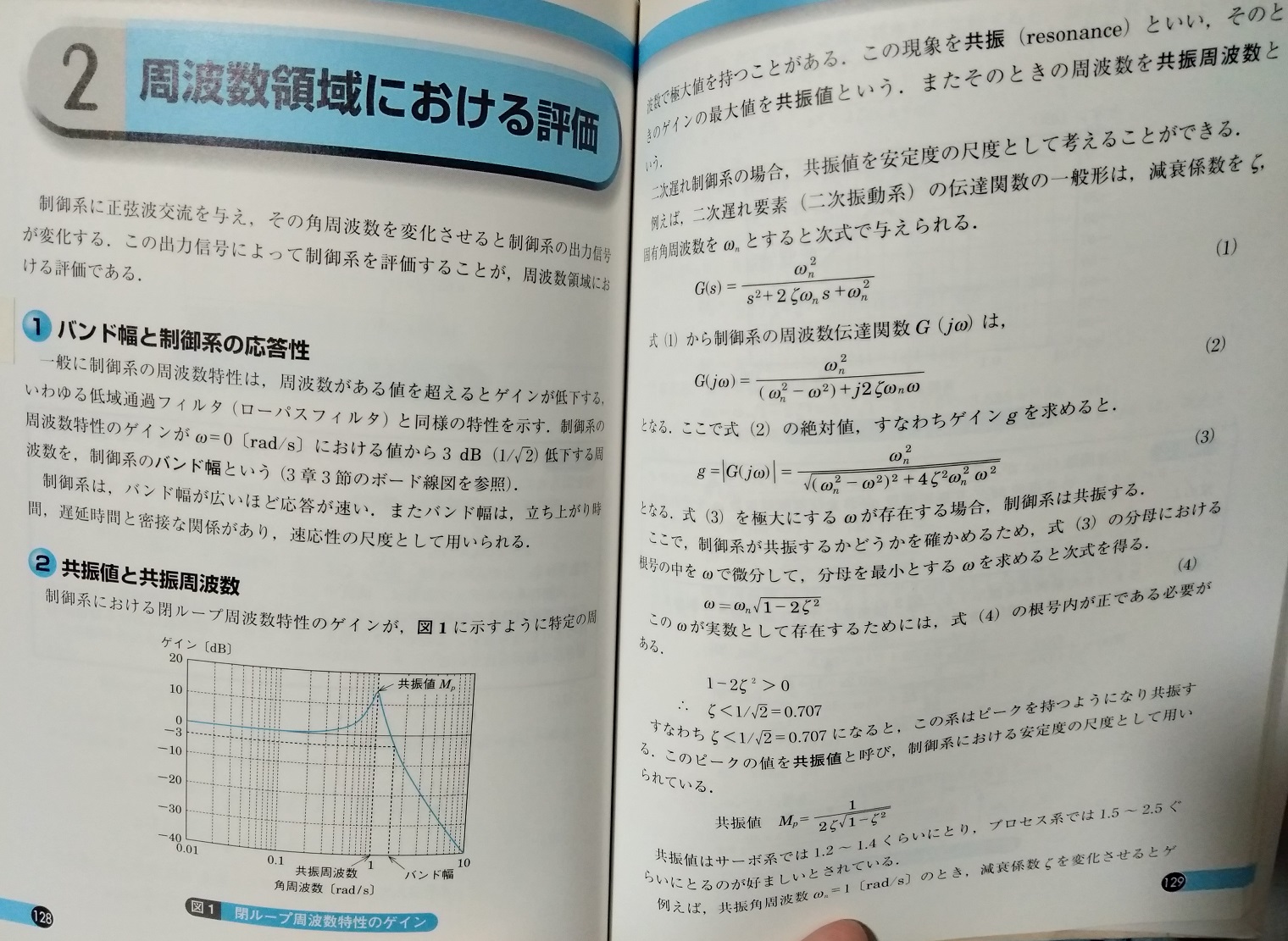
バンド幅と制御系の応答性
一般に制御系の周波数特性は、周波数がある値を超えるとゲインが低下する。
いわゆる低域通過フィルタ(ローパスフィルタ)と同様の特性を示す。
制御系の周波数特性のゲインがω=0(rad/s)における値から3db(1/√2)低下する周波数を制御系のバンド幅と言う。
以上のところ頭に入れておくだけでも、ボード線図を見るときに役に立ちます。
PID制御の特徴
PID 制御について、170ページから174ページ。
ここのページを覚えておくだけでも PID 制御のイメージが湧きます。 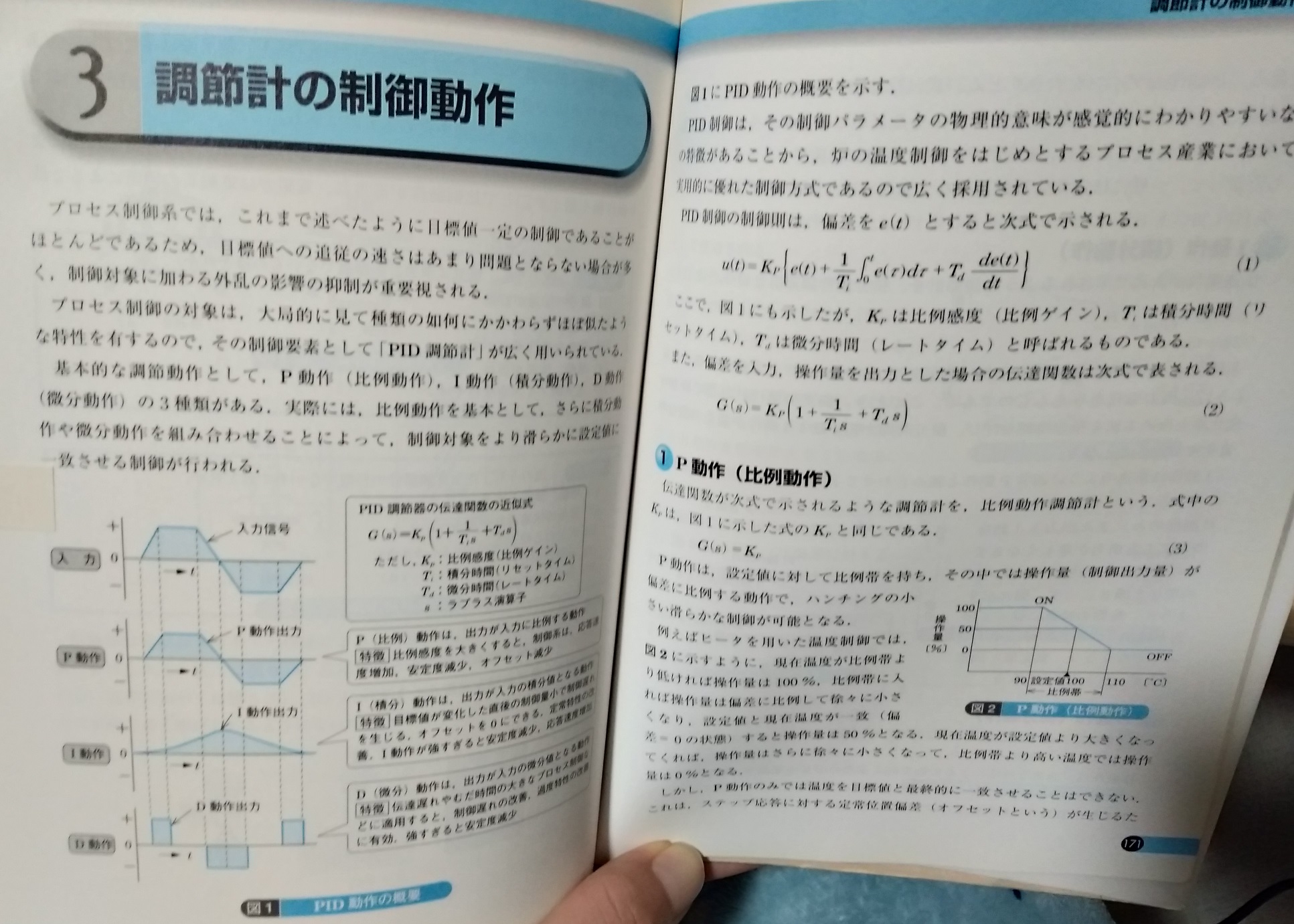
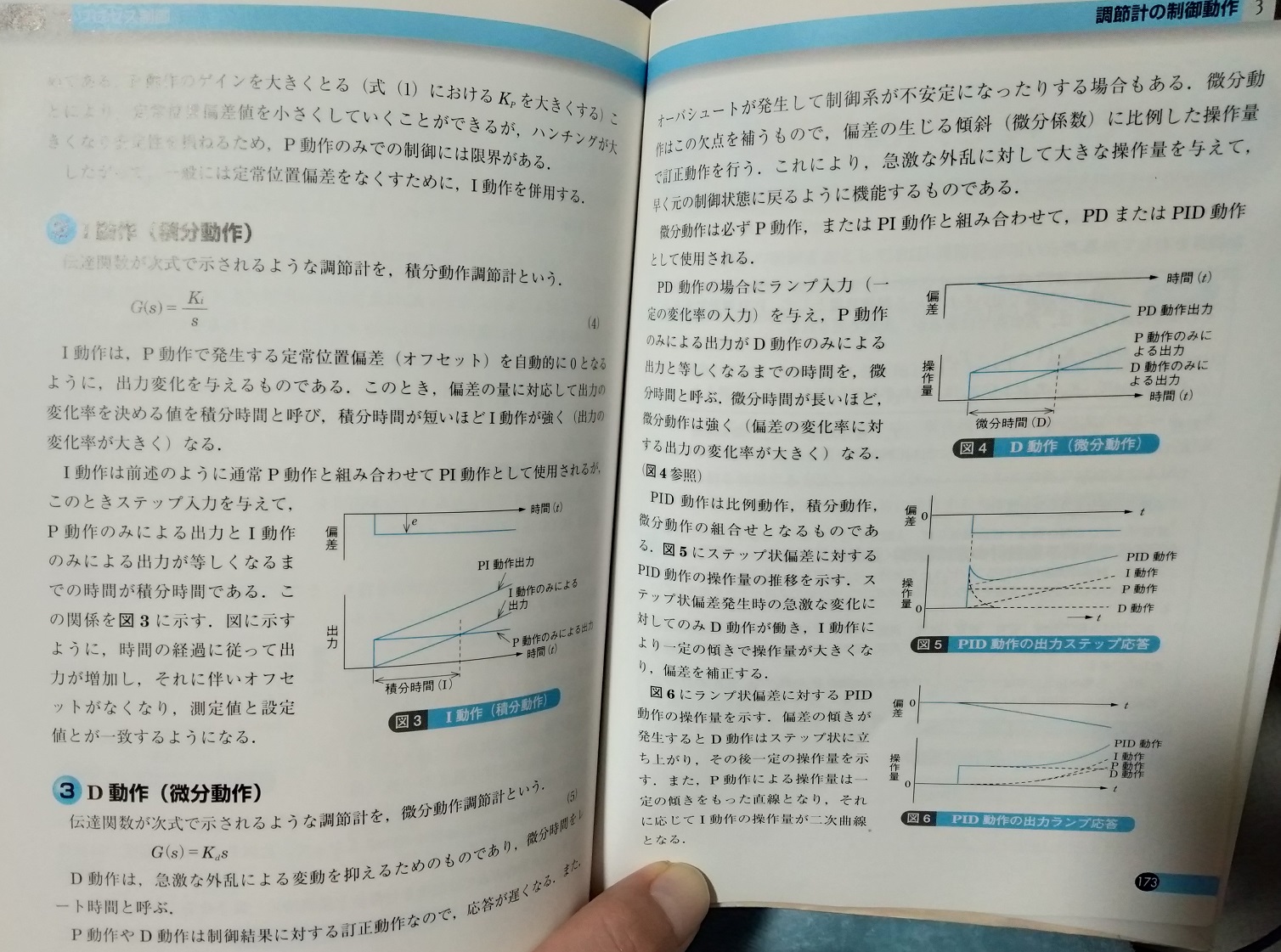
P動作は、入力に対して比例して出力が変化する。
I動作は、入力が積分される。入力に対して、出力が少々遅れが出てくる。
業務では主にPI制御がよく使われると聞きます。このPとIのイメージをつかめるだけでも本書の価値ありです。
ちなみに、
なぜP 制御のみでは、目標値と出力値を一致させることができないのか?
イメージしにくいと思います。
本書では一応このように説明してあります。
ステップ応答に対する定常位置偏差(オフセット)が生じるためである。
P動作のゲインを大きく取ることにより、定常位置偏差値を小さくしていくことができるが、ハンチングが大きくなり安定性を損ねるため、P動作のみでの制御には限界がある。
したがって、一般には定常位置偏差をなくすために、I動作を併用する。
うーん、でも、なぜ比例動作だけでは目標値に一致させることができないのか?
まだまだ理解できないなーと思っていました。
その辺の補足説明は、実は Web で公開されてるブログで分かりやすい説明がありました。個人で書かれている人の説明です。
私もまた復習で読ませていただきたいので、リンクを貼らせていただきます↓
理工系の博士過程で勉強されている方が作ったブログの記事。
なぜ P制御だけでは目標値に一致することができないのか?
定常位置偏差ができてしまうのか?
というのが数式で書かれています。
数式自体を理解することができなくても、
数式を解いた結果として、
出力は目標の1/2のところで収束してしまう
というのが書いてあって、イメージしやすいと思います。
マジでわかりやすくまとめて書いていただいています。ありがとうございます。
[quads id=2]
まとめ
「絵ときでわかる自動制御」
ほんとタイトル通り、図が多いです。本書の特徴は、図見てなんとなくイメージが掴めるというところでしょう。
本書の中盤以降に、周波数応答、ボード線図、過渡応答、PID制御の概要が書いてあります。
業務で活用するために、急いで
ボード線図の読み方を知ったり、
PI制御とはどんな制御?メリットとデメリットは何?
ってことを勉強するには最高の教材。
業務で自動制御をする必要に迫られた人にとっては、手っ取り早く概要を勉強することができる本だと思います。選んでおいて絶対損はないです↓
コメント