- フィードバック制御の微分、積分、1次遅れ
- ラプラス変換などの制御工学と言われる分野の基礎入門
の勉強には本書「基礎と実践 制御工学入門」
が非常に役に立ちました。
本書は理工系の大学の学生向けに書かれた本です。
「実践」とタイトルに書かれているとはいえ、どちらかというと学生の机上の勉強向けです。
私自身は、会社の業務でモーター制御など、制御系の分野を担当することになったのがきっかけで、本書を手に取りました。
本書の著者は3人います。3人の方すべて、大学の教授ですね。経歴を見る限りは、おそらく、企業でゴリゴリと実務をされたような方ではなさそうです。なので、理論というか、机上の勉強用の内容が強い本です。
とは言え、実務で自動制御を使う時には、基礎としては必ず必要となる分野です。業務で必要な人も読んでおくのが良いでしょう。分かりやすいです
著者は3名。
横山修一さんは、工学院大学大学院卒、工学博士。工学院大学の教授(出版当時の情報)
濱根洋人さんは、工学院大学大学院卒、工学博士。日本学術振興会特別研究員、カリフォルニア大学の研究員、群馬大学、青山学院大学、工学院大学などで教えてこられた方。
小野垣仁さんは、工学院大学大学院卒、工学院大学に勤務された方。
では、以下は私が自動制御を実務として使う時に必要なためメモをしておいた内容です。
「基礎と実践 制御工学入門」でラプラス変換やフィードバック制御の理論が勉強できる
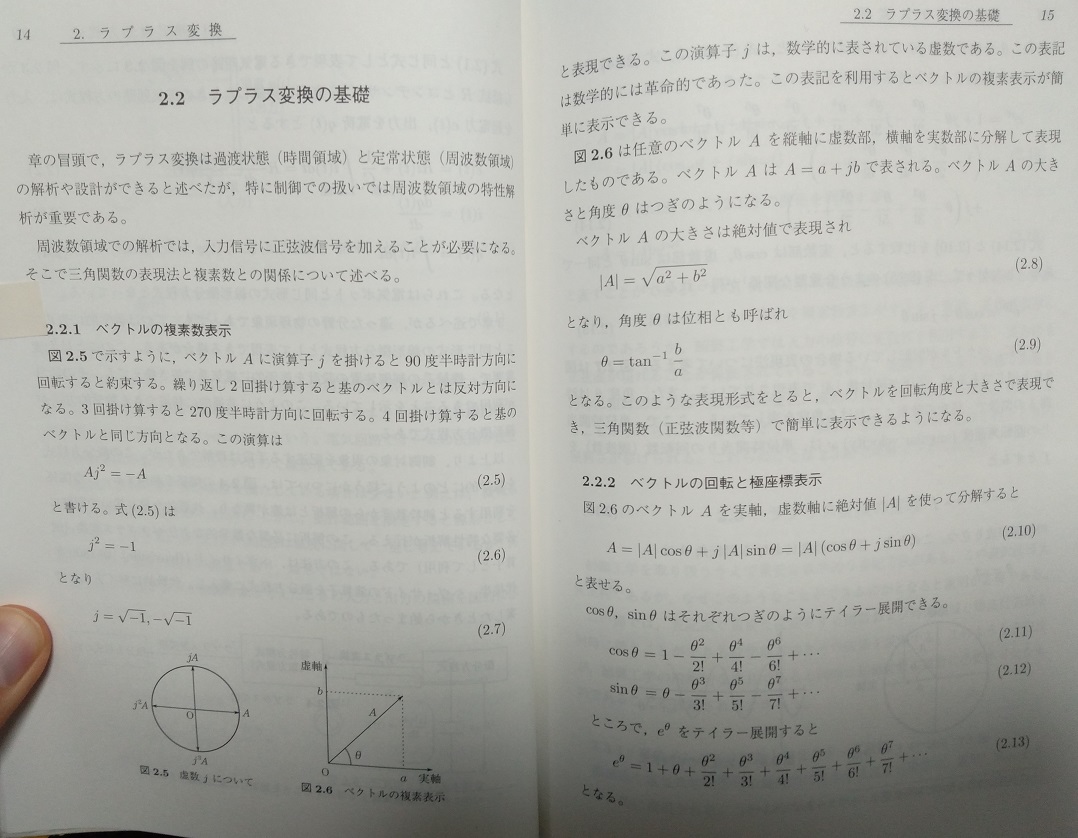
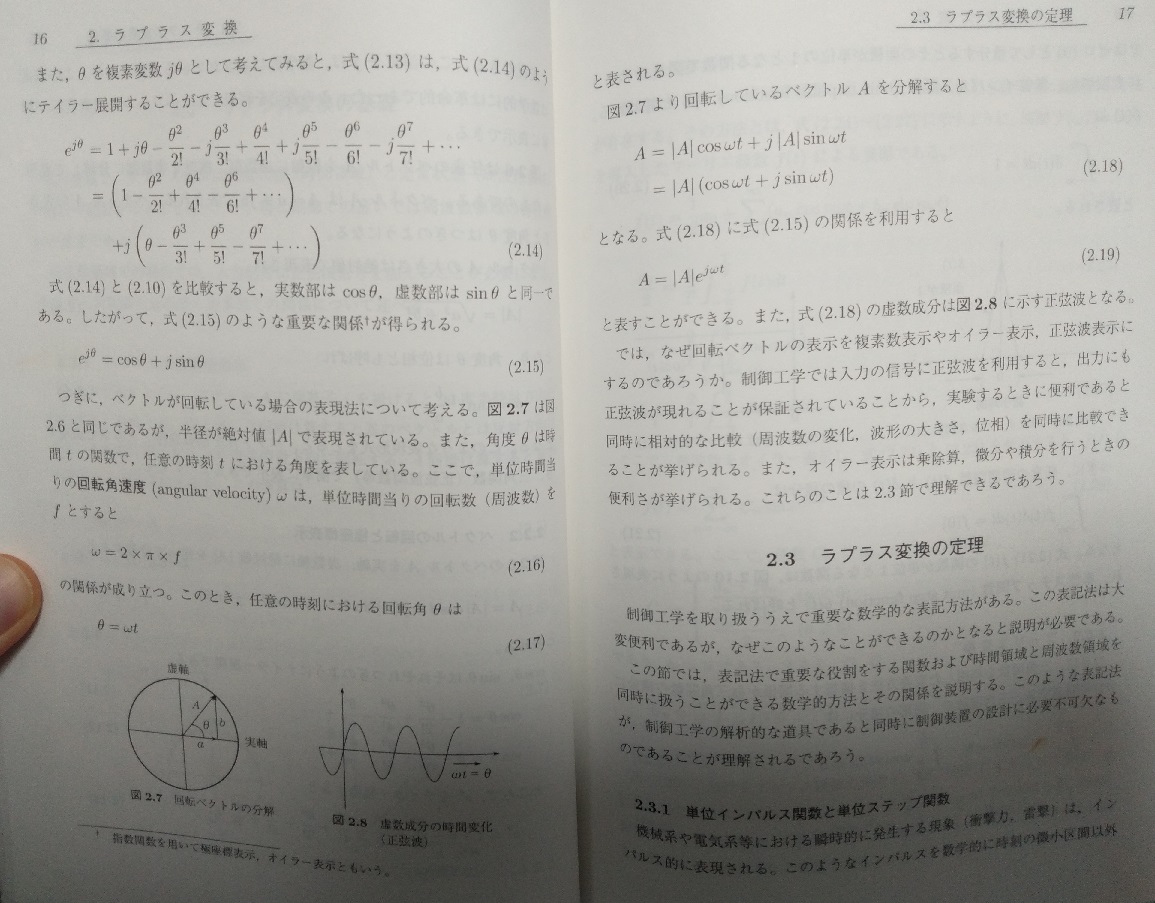
ラプラス変換のキホンとして、14ページから17ページ。
- 複素数表示で考える図。演算子jをかけると、90°反時計方向に回転する
- ベクトルの大きさを絶対値を表す式
- 位相角度Θは、アークタンジェントの式で表せる
- 回転角速度ωの式
このあたりの説明が簡潔でわかりやすくまとまっていました。
フィードバック制御(PID制御)
本書のメイントピックはフィードバック制御。
PID制御の説明では、比例動作、積分動作の説明が分かりやすく書いてあります。
ブロック線図のイメージも。
実務に役立つ内容として、163ページを引用します。
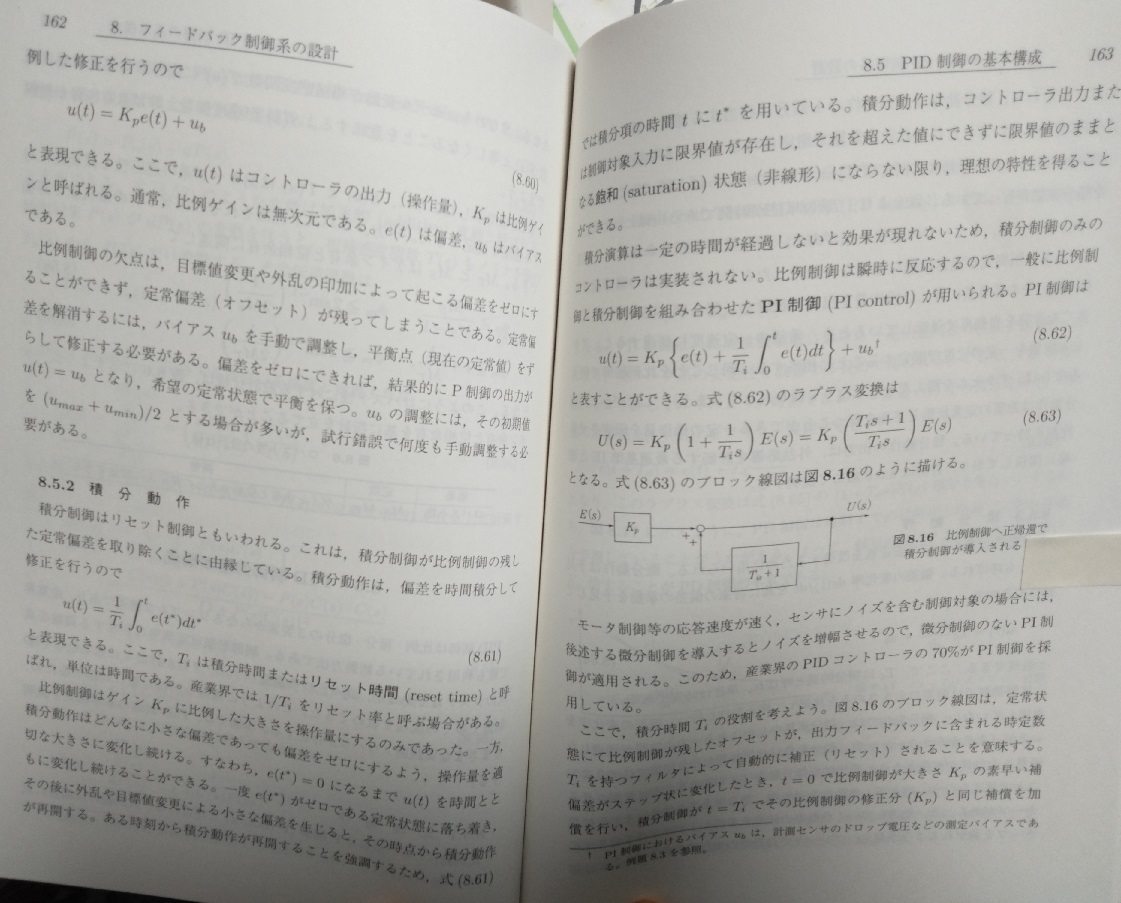
モーター制御等の応答速度が速く、センサにノイズを含む制御対象の場合には、微分制御を導入するとノイズを増幅させるので、微分制御のないPI制御が適用される。
このため、産業界の PID コントローラの70%がPI制御を採用している
なるほど、別の記事で紹介したモーター制御の入門書には、PIDの微分制御のところが説明してありませんでした。実用的には、PID とは言っても PI制御をするのがごく一般的に使われるからこそ、実務書にはPI制御を取り上げていたんだと理解。
それから積分制御についてもう一つ重要な点について書いてありました。
それが164ページ。引用します。
積分動作にはもう一つの重要な点がある。
積分量が蓄積され保存されることである。
制御量が定常状態に偏差なく収束した時、これまでの積分量が保存されその積算量に等しい操作量を出力し続ける
これ、何言ってるかと言うと、
積分制御をすることによって希望の速度に到達した時、
(車の運転でいうと)アクセル位置が一定の位置で固定することに相当する。
これが比例制御の場合だったら、アクセルを踏んだり離したりを繰り返してしまう。
積分動作は希望の状態を平衡に保つことができる制御といえる。
PID制御の基本形や実用的な使い方
そしてもう一つ166ページ。
PID 制御の基本形のブロック線図が参考になります。
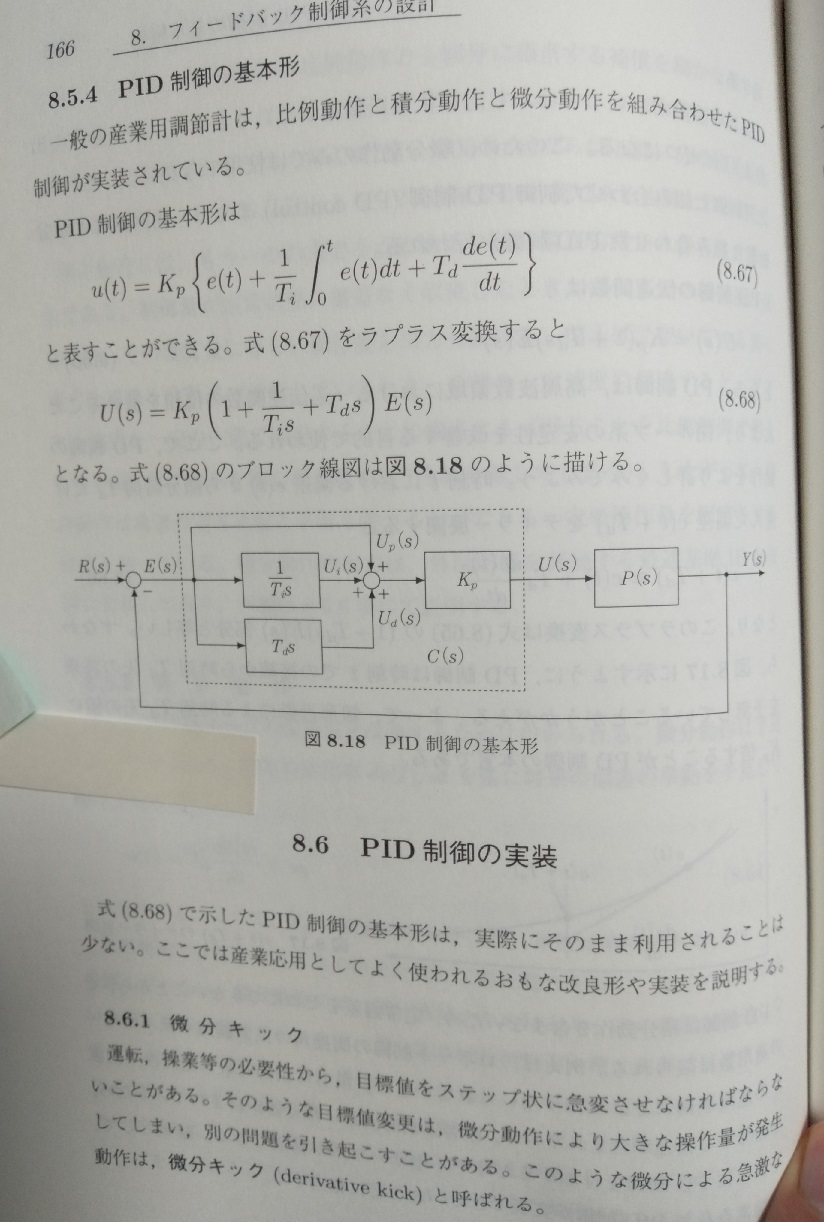
実際、実務ではこの通りに制御されることはないそう。
本書の後半には、
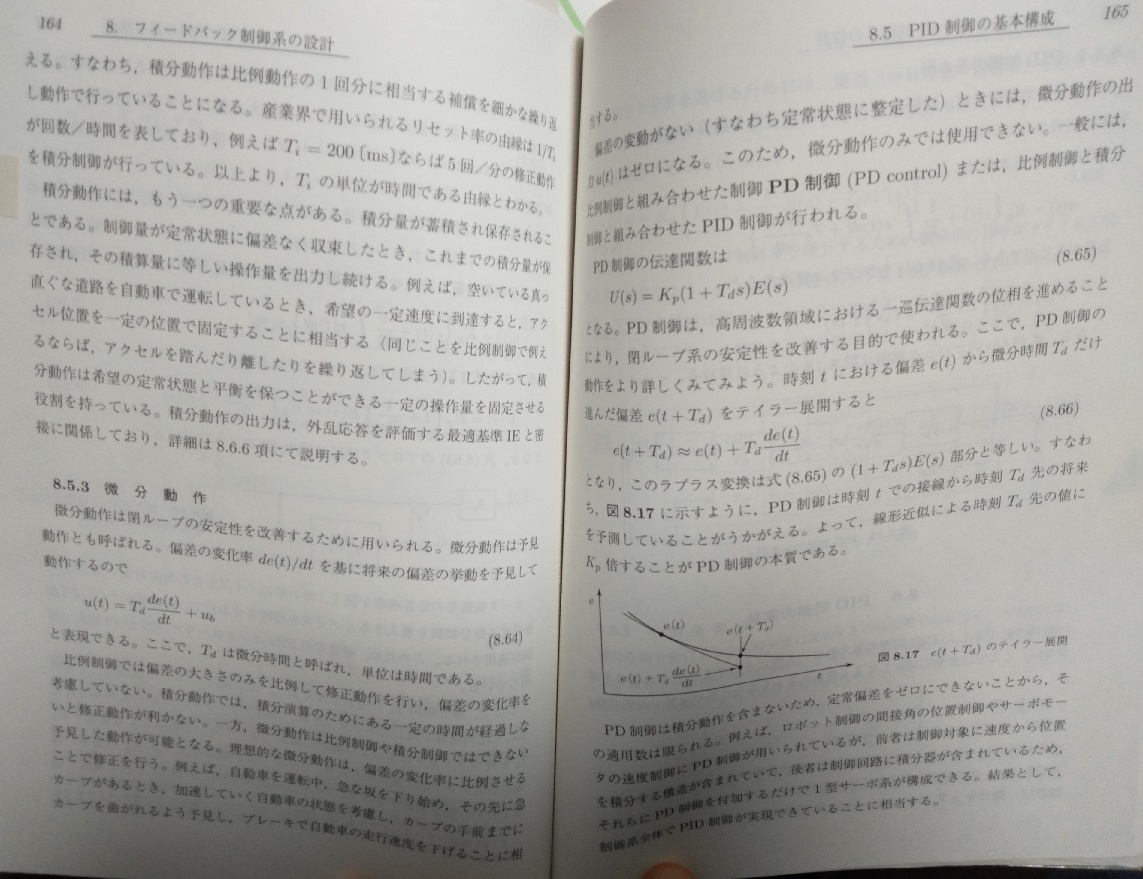
微分キック、不完全微分、目標値重み付け、外乱の抑制、アンチワインドアップ
とか、の用語が出てきます。そういった制御内容を加味して実際にはPID制御されるみたい。
そのあたりまで突っ込むと、内容が難しかったのでとりあえずパス。
まず本書でPID制御を学ぶ上で必要な重要な点は、
PID 制御とはどういう制御内容か?
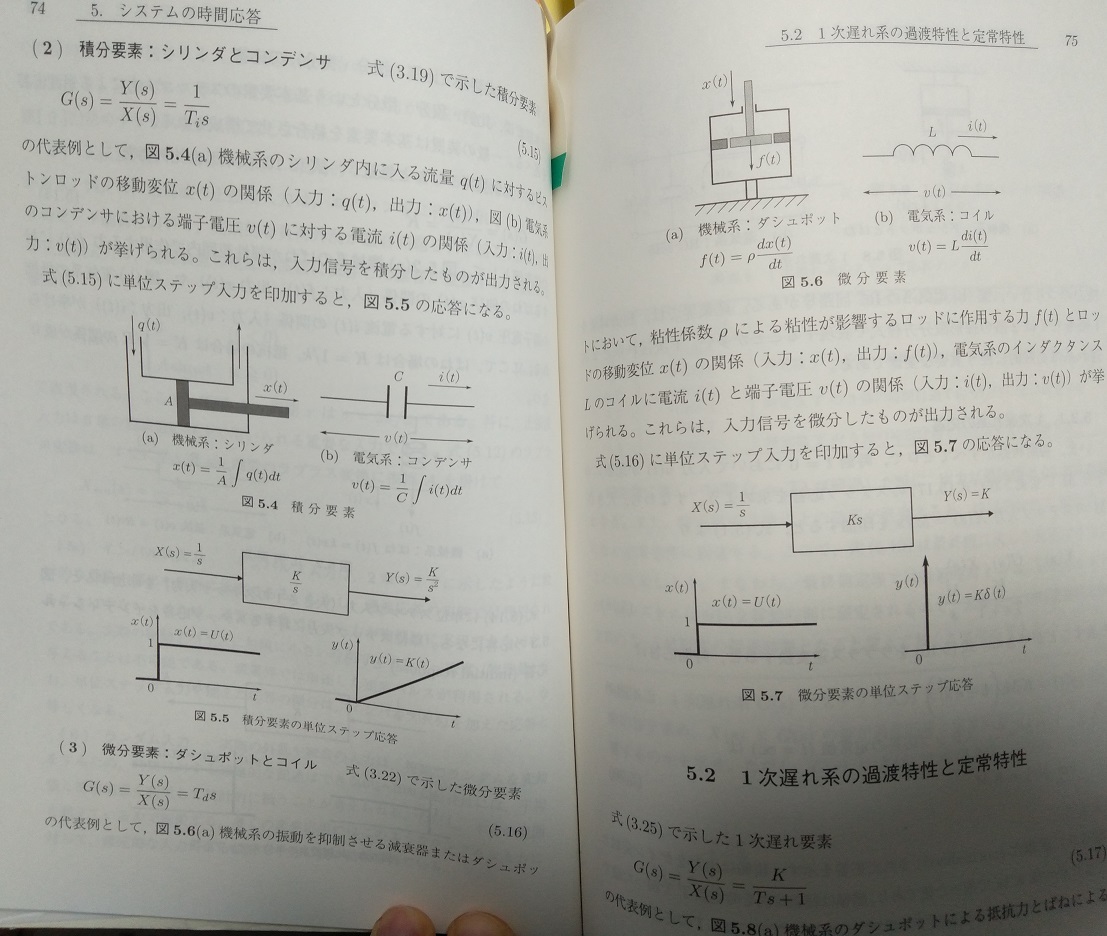
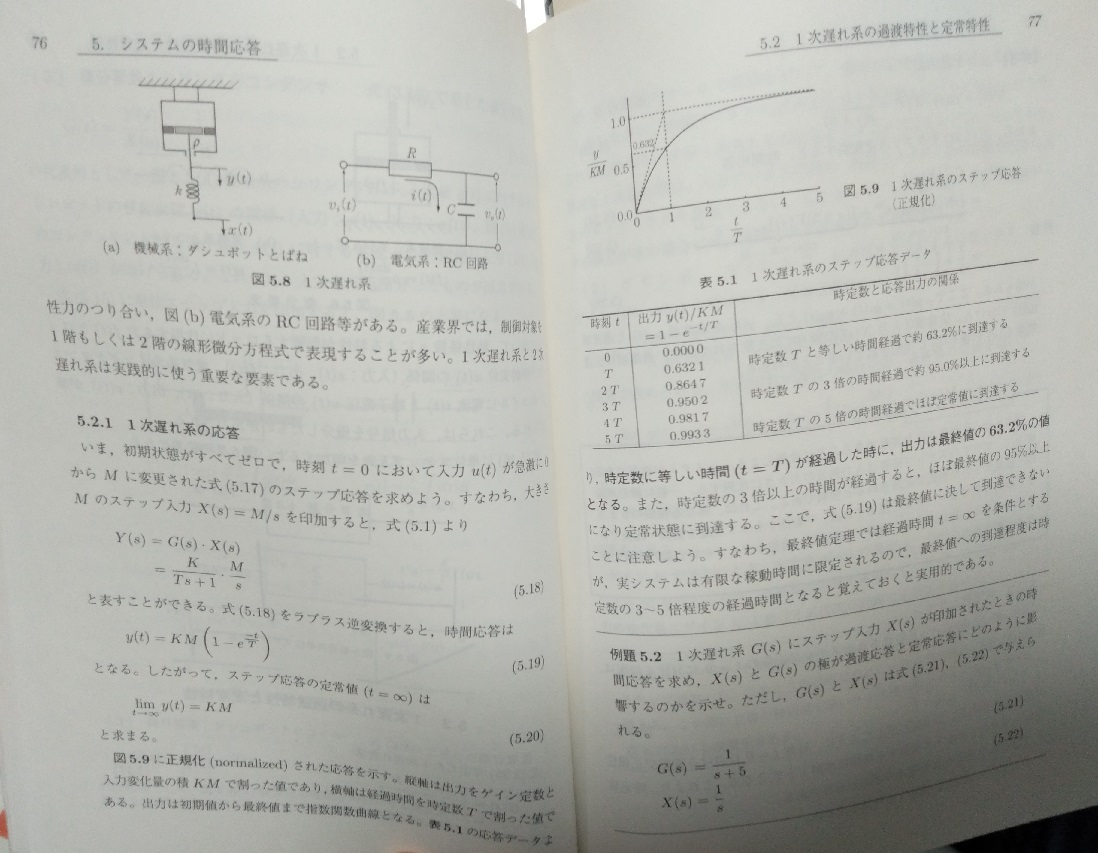
基本的な内容として、比例、微分、積分。そして、1次遅れ。この辺りを把握しておくのが大事でしょう。
[quads id=2]
まとめ
ラプラス変換から始まり、制御工学というか、フィードバック制御についての概念、理論を勉強するには本書はよい本です。
大学の工学部の学生向けの本ではあります。が、会社の業務の実務で制御系をやる人にとっても、基礎を勉強するのに活用できます。
関連記事
ラプラス変換の微分積分・一次遅れやインパルス応答・インディシャル応答の式の説明が分かりやすい本
コメント