ブラシレス DC モーターを実務でこれから使おうとする方は必須の本だと言えます
「入門モーター制御 実務に役立つ制御の考え方」
森本雅之さんが書かれた本です。
著者の森本さんは、慶応大学工学部卒業された後、三菱重工業で約30年近く勤務。名古屋工業大学や東海大学で教えてこられた方。
つまり、何が言いたいかと言うと、実務でモーターを扱う仕事をされていた方が書いた本であることがポイントだと思います。
私は、組み込みエンジニアとして、ブラシレスDCモーターをマイコンで制御する仕事を始めた時に読みました。同じような方は非常に役に立ちます。
ちなみに、Amazonのレビューで、
「内容がよくわからない」とか言って、本書の評価の星1をつけている方がいらっしゃいました。読者の方が、どういう目的で本書を読んでいるのかがわからないので、星1の評価をつけた理由がわかりません。
少なくとも私のように、実務でブラシレスモーターを使う方にとっては非常に内容が充実しています。役に立ちます。
入門書として、DCモータやブラシレスモータの初学者としては最適な本です。
以降は、私が本書で、ブラシレスモータ制御について勉強した時にメモした重要な箇所についての記録です。
※30日間無料体験のAmazonキンドルに加入すれば、その期間にキンドル本については無料で書籍が読めてしまいます。
ブラシレスモータの制御を理解するのにメモした重要なページ
まず15ページ。
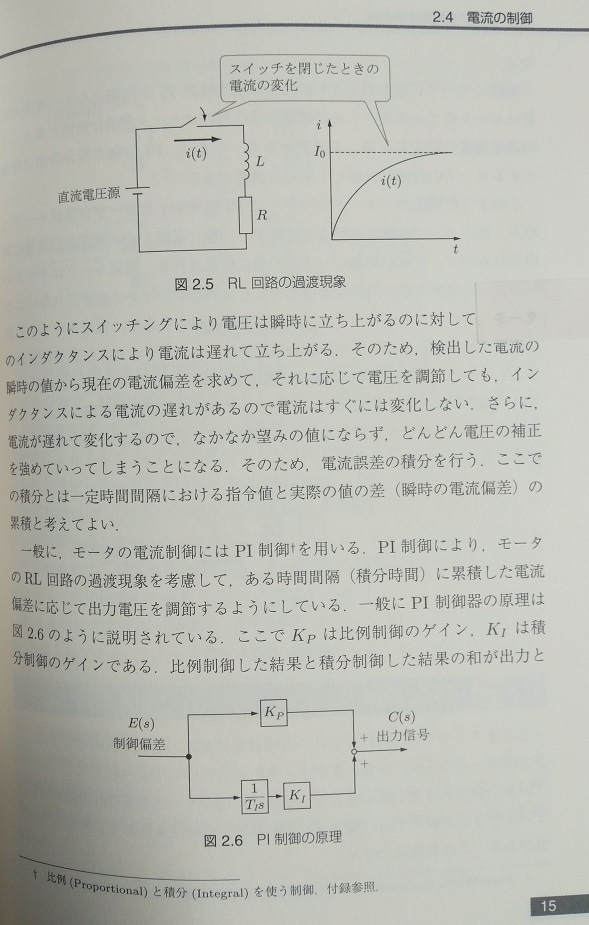
LR回路の過渡現象とPI制御について書いてあります。
ここで何が重要かと思ってメモしたかというと、、、
引用します。
スイッチングにより電圧は瞬時に立ち上がるのに対して、モータのインダクタンスにより電流は遅れて立ち上がる。
そのため、検出した電流の瞬時の値から現在の電流偏差を求めて、それに応じて電圧を調節してもインダクタンスによる電流の遅れがあるので電流はすぐに変化しない
トルクが出るまで遅れがある。過渡現象があることを頭に入れておくことが大事ということです。
コイルのインダクタンスにより、印加した電圧に対して、電流・トルクに遅れが生じる
次に169ページ。
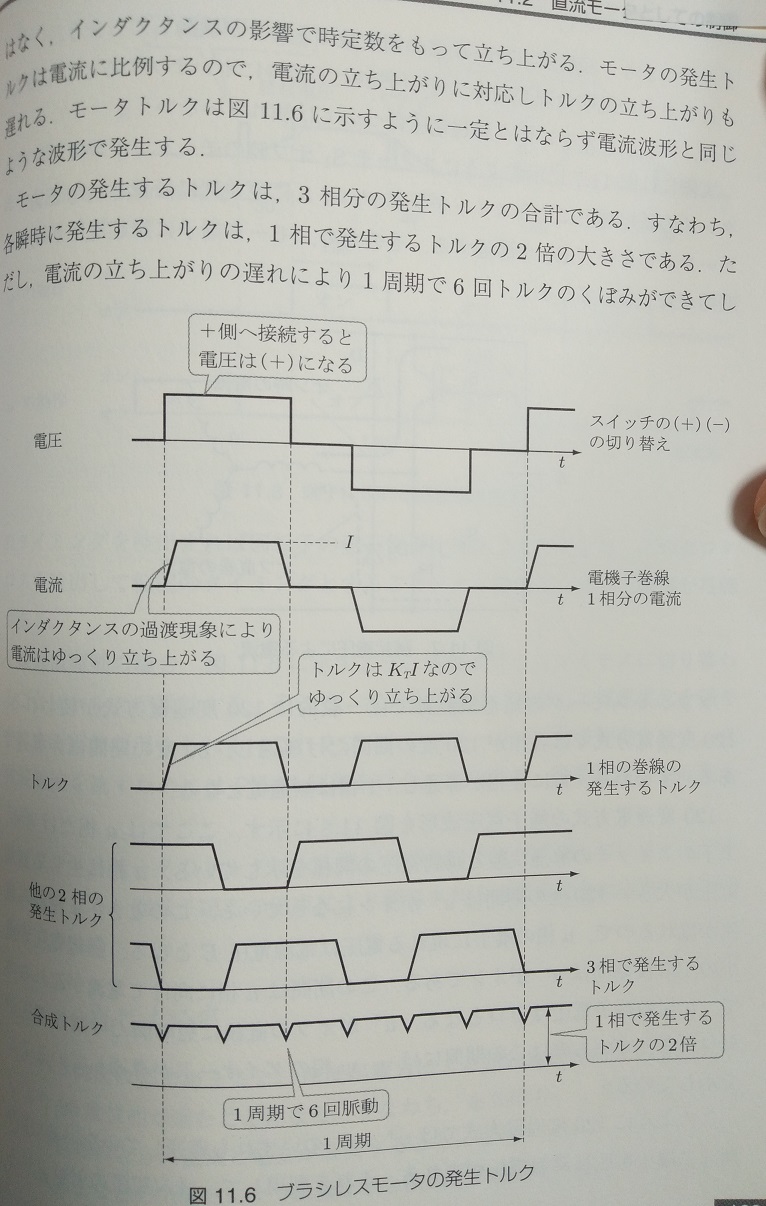
実際にブラシレスモーターの制御の方法について書いてある内容です。
先ほどの
「電圧の印加に対して、インダクタンスの過渡現象により電流がゆっくりと立ち上がる」
といった点についてイメージができるように図示してあります。
時間軸(周期)で書いてあります。
この図を見ると一発でイメージが分かると思います。
電流は、過渡現象によりゆっくり立ち上がる。つまり、トルクもゆっくり立ち上がる。
また、ここでわかるのが、
(三相制御でモーターを動かした時の話)、
3相全体の合成トルクは、1周期で6回脈動するということ。トルクが一瞬下がるのは、電圧を切り替える時に電流の遅れが発生するので、そこで脈動が発生する。
さらにこの図を見てわかるのが、合成トルクは3相のうち、2相分に電圧をかけているので、合成トルクは1相分の2倍でるということ。
次に171ページ。
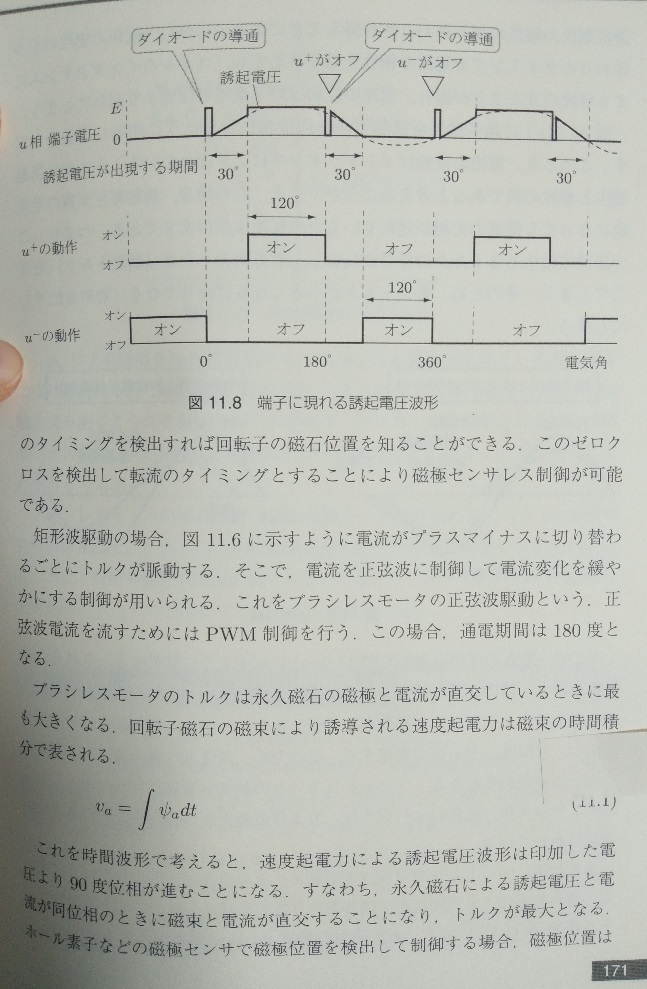
端子に現れる誘起電圧の波形のイメージが分かります。
ある相に通電するタイミングのイメージも分かります。120°通電の時。
通電していない時間、この図で言うと30°の時間(この図は電流を流してない期間が30°と書いてありますが、ここは60°の記載間違いではないでしょうかかね??まあ、それはともかく。)
ここで大事なのは、
ある相に電圧を印加していない時に、その相から誘起電圧を見ることができる。ただし、電圧をオフにした時の直後は、ダイオードの導通によって誘起電圧がガツンと上がっている。言い方を変えると、電圧の印加をOFFにした直後は誘起電圧を正しく見れないってことが、
この図をみて読み取ることができます。
それともう一つ171ページの引用で、
ブラシレスモーターのトルクは永久磁石の磁極と電流が直交している時に最も大きくなる。
回転子磁石の磁束により誘導される速度起電力は時速の時間積分で表される。
トルクが最大になるのが、永久磁石の磁極と電流が直交している時
ということが重要なポイントですね。
速度起電力による誘起電圧波形は、印加した電圧より90°位相が進むというイメージを覚えておくのが1つのポイントです。細かい理論は抜きにして、位相がずれるということだけ覚えておく。
ブラシレスモータの進角制御
そこで172ページの説明につながります。
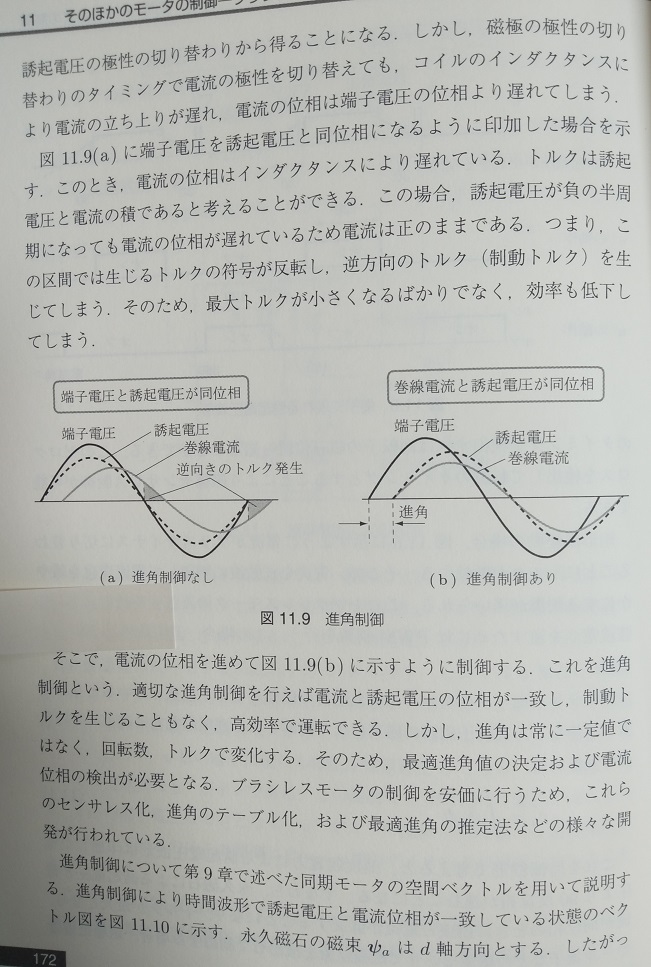
端子電圧と誘起電圧が同位相になり、発生するトルクが90°遅れて、効率的なモータ制御ができないことが図をみて感覚的に理解できます。
進角制御の細かい内容までは書いてありません。
本書では、効率的なモータ制御をするには進角制御が必要
ということが理解できるまでで十分だと思います。
ブラシレスモータの電圧制御と電流制御の違い
177ページでは、
電圧制御のイメージと電流制御のイメージの違いが分かります。
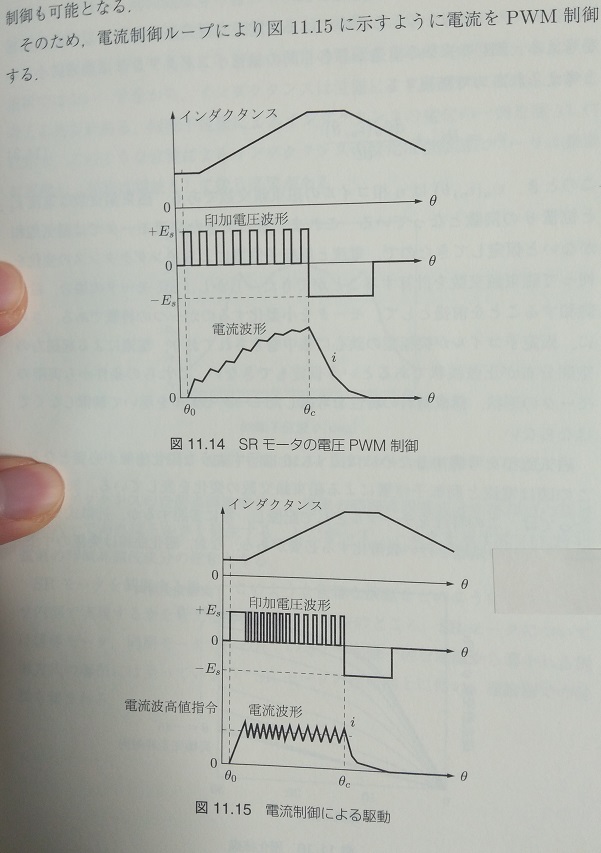
電圧制御はある相に電圧を印加するときに一定のPWM周期で一定のデューティー比で制御する。
その一方で電流制御は、PWM周期とデューティー比を変化させながら制御する。別の言い方をすると、電流が一定になるようにPWM波形を調整するということ。
本書では、イメージができればOK。
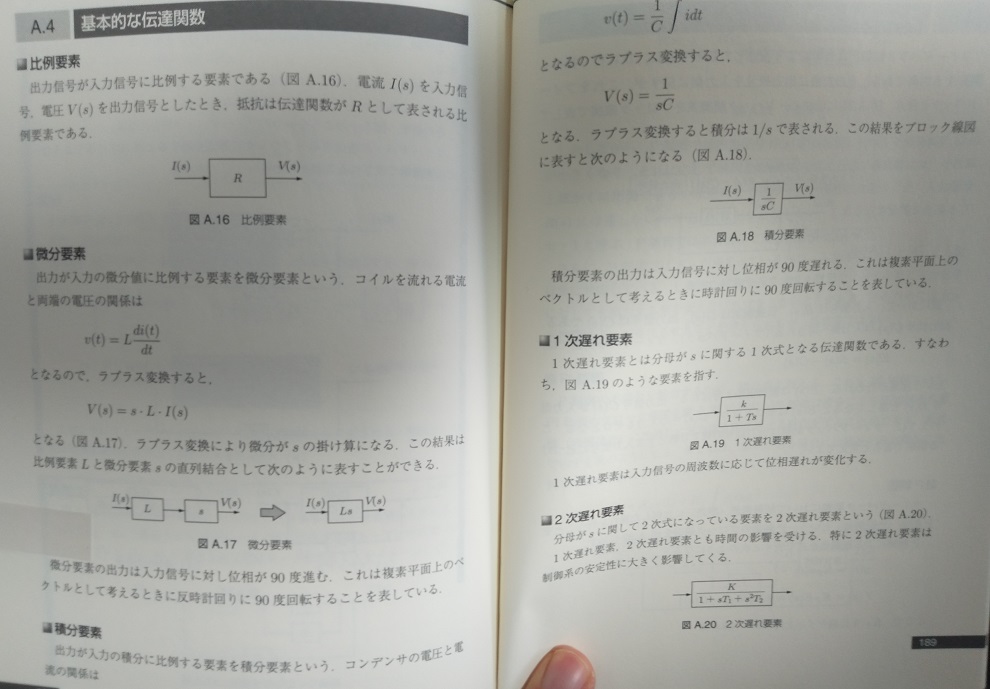
モータ制御に必要なブロック線図、伝達関数
本書の巻末には、モーター制御に必要となってくる基本的な伝達関数やブロック線図の内容が端的にまとめてあります。
自動制御系の専門書にはお決まりの内容ですが、
本書は、とにかく簡潔に書かれています。
- 微分要素
- 積分要素
- 一次遅れ要素
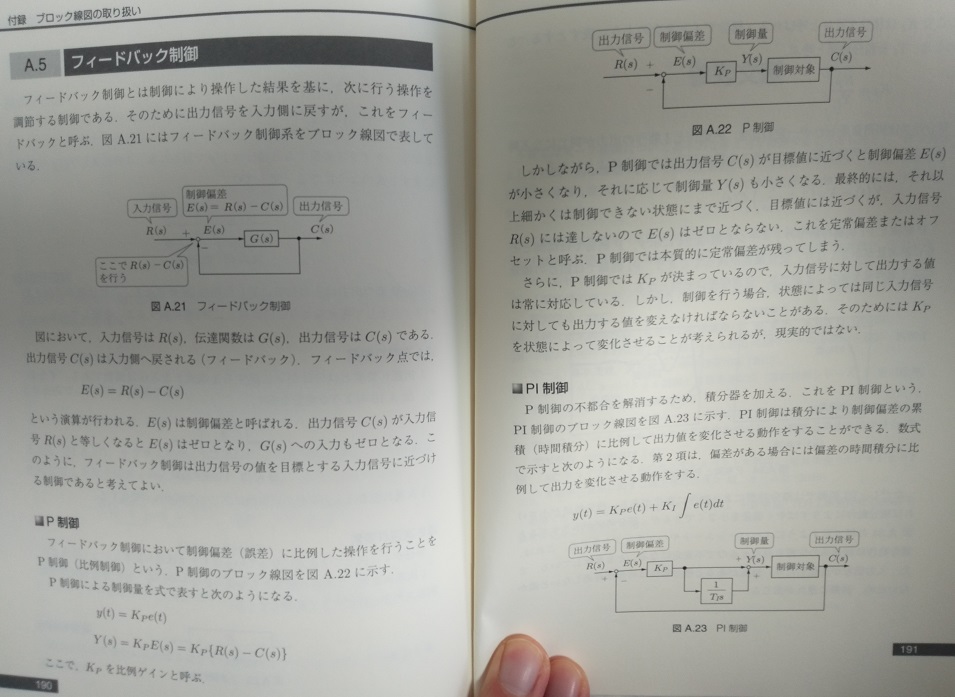
190ページからの3ページは、
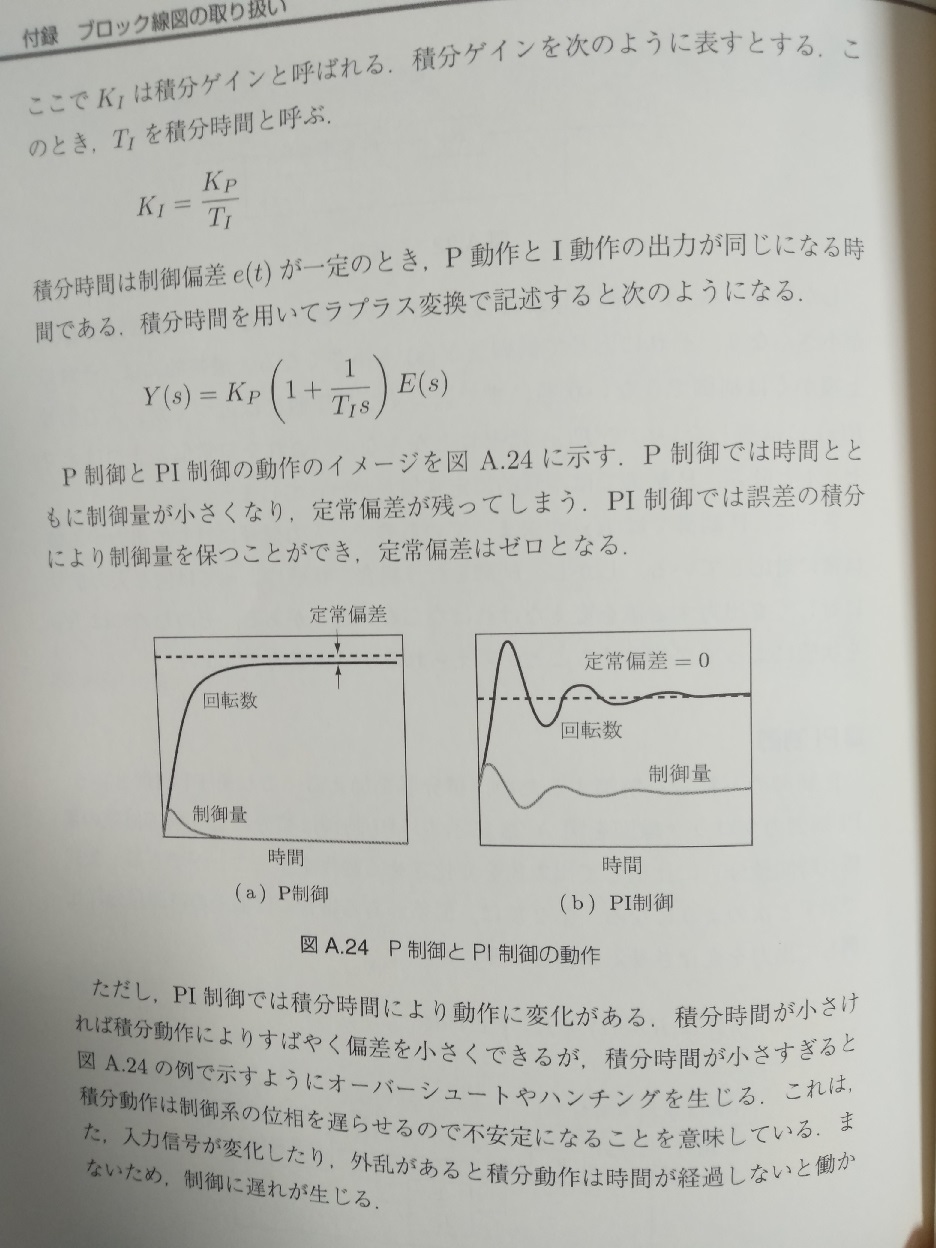
- フィードバック制御
- P 制御
- PI制御
について、概略イメージが分かるように書いてあります。
PIDまでは書いてありません。
[quads id=2]
まとめ
以上のように、
「入門モータ制御」
は、ブラシレスモーターをどうやって動かすのか?
について、基本的なことが体系的に書かれています。
基本を越えて、細くどう制御するか?
というところまでは書いてありません。そういうのはまた別の専門書を読む必要はあると思います。
モータ制御の業務を初めてやる
という方向けです。
私のように組込みシステムのエンジニアで、モーターを使い始めてまだ一か月も経っていないような人には最適な本です。
アマゾンのレビューのコメントにまどわされないように。
コメント