永久磁石、BLDCモーターのマイコン制御を作りこむエンジニアが読んでおいた方が良い本でした。
「高トルク&高速応答センサレスモータ制御技術 シンプルで高信頼ベクトル制御で力強く静かに回す」
岩路善尚さん、足塚恭さんの共著です。
こちらの本で使っているマイコンは、ルネサスエレクトロニクス製 RX マイコンです。
ただし、マイコンはどのメーカーのものを使おうとも、本書は役に立ちます。
なぜなら、本書の中では、ルネサスのマイコンに特化した内容はほとんど出てきません。
それよりも、モーターをいかにセンサレスでうまく動かすか?
に特化して書かれています。
なのでTIであろうが、 ST マイクロであろうが、マイクロチップであろうが、
どのマイコンを使ってても、とにかくモータ制御をマイコンで行いたいという方には役に立ちます。
ちなみに、本書には、ルネサス製の RXマイコンのサンプルソースがCD-ROMで同封されています。本書を書かれた方がサンプルで作ったソースコードです。
私は、本書を最初から最後まで読了しました。一方で、CD-ROMのサンプルソースはまだ見ていません。本書は、サンプルコードを見なくても、モータ制御のノウハウを身につけることができる構成になっています。
CD-ROMのソースコード最初から見るのは必須ではないです。
【関連記事】
センサレスベクトル制御のメリット・デメリットは?実務に使える専門書「ACドライブシステムのセンサレスベクトル制御」
「高トルク&高速応答センサレスモータ制御技術」で学べる内容
その前に、本書でどんなことが書かれているのか?
本書の最初の方は、直流モーターの動かし方や原理。センサレス制御のメリットについて。
本書の中盤は、永久磁石モーターの120°通電について、ホールセンサ付きとセンサレスそれぞれについて解説。
そして、後半からが難しくなってきます。ベクトル制御に入ってきます。ベクトル制御の話が一番難しいですね。パーク変換とか、クラーク変換とかって用語が出来たり、ベクトルの考え方が必要になってきます。
最後の第3部では、センサレスベクトル制御の実践的な内容について書いてあります。
モータの始動時に、どうやってセンサレスでモーターを動かすか?
デッドタイムの補償やリンギング、
低速域でロータをどうやって位置推定するか?
などなど、センサレス制御をするときに必ず考慮しなくてはいけない内容について説明が書いてあります。
本書を読むと、センサレスの制御方法って、やり方が複数あるんだなーってことがよく分かります。
どんな制御が正解っていう話ではないですが、制御方法によってメリットとデメリットのそれぞれがあることが分かってきます。
では、どんなところが役に立ったのか?
私がメモ書きした箇所を下記にアウトプットしておきます。
「高トルク&高速応答センサレスモータ制御技術」でメモ書きした箇所
ページ32。
1次遅れについて。
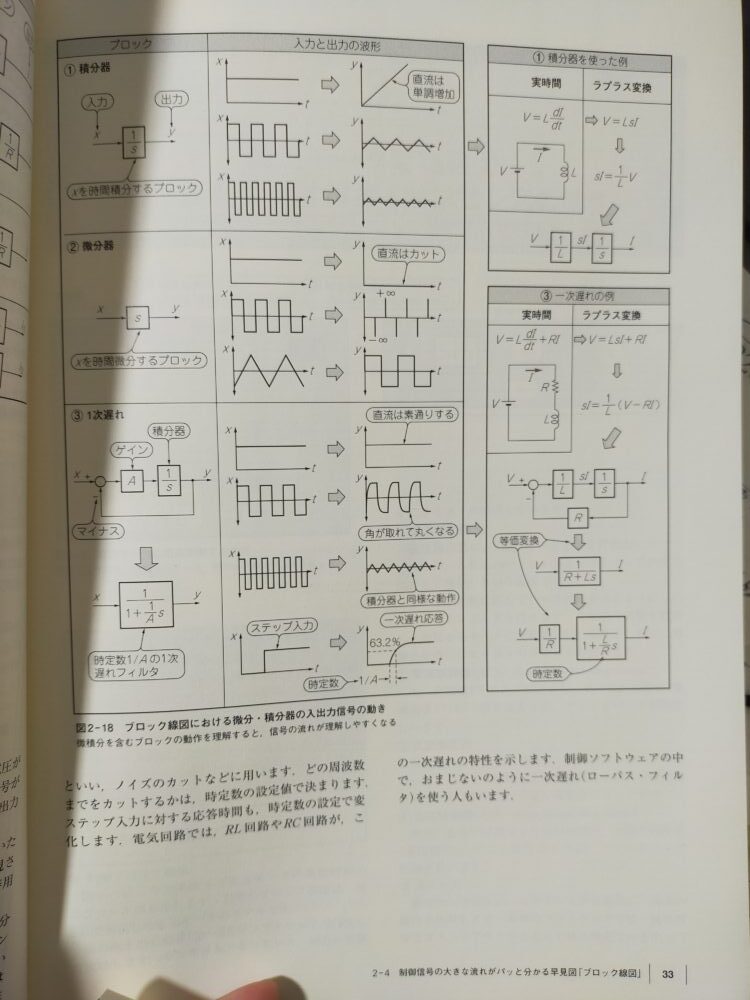
積分器と微分器のイメージはわかりやすいですが、
1次遅れって何なの?
ゲインと積分器とフィードバックからなるブロックです。
ゲインの逆数が時定数です。
このブロックは直流についてはそのまま信号が素通りし、
周波数の高い成分は通りにくくなります。
このような特性をローパス特性という。
ノイズのカットなどに用います
33ペー時の1次遅れの図。分かりやすいですね。
ページ55。
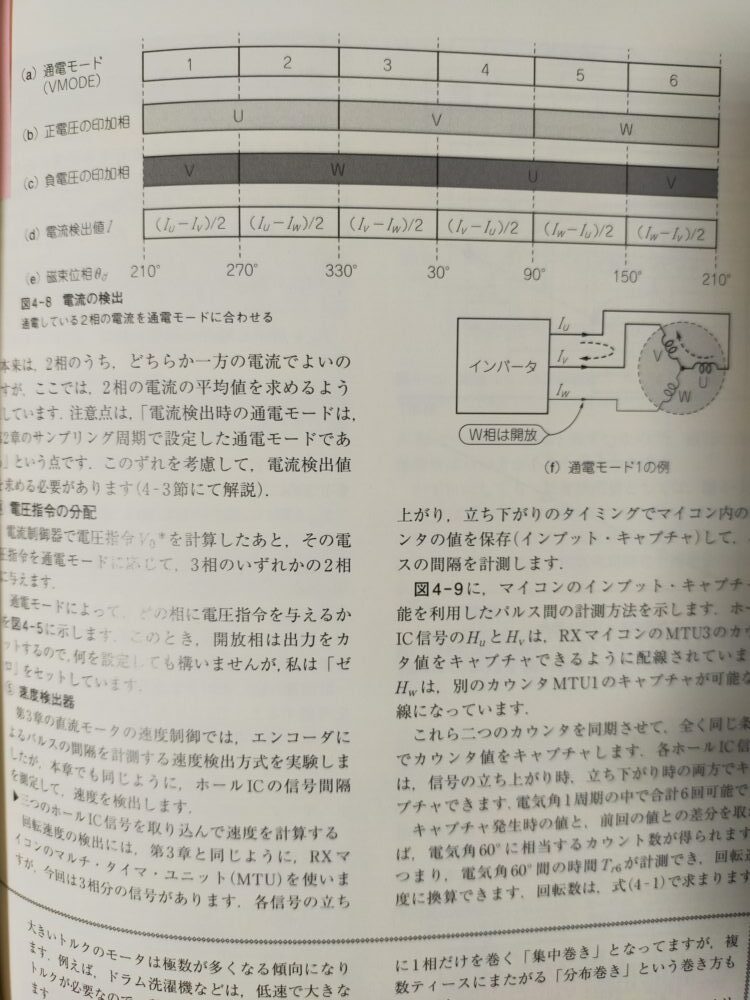
120°通電時の電流検出の計算式。
6つのパターンで電圧をU,V,W相に印加します。それぞれのパタンの時、電流はどのように計算すればいいのか?
この図を見れば一目で思い出せます。図4-8ですね
さて、話がややこしくなってくるのがベクトル制御の原理。
どのような電圧、正弦波の電圧を加えていくか?
についてイメージがしやすいのが図6-7です。
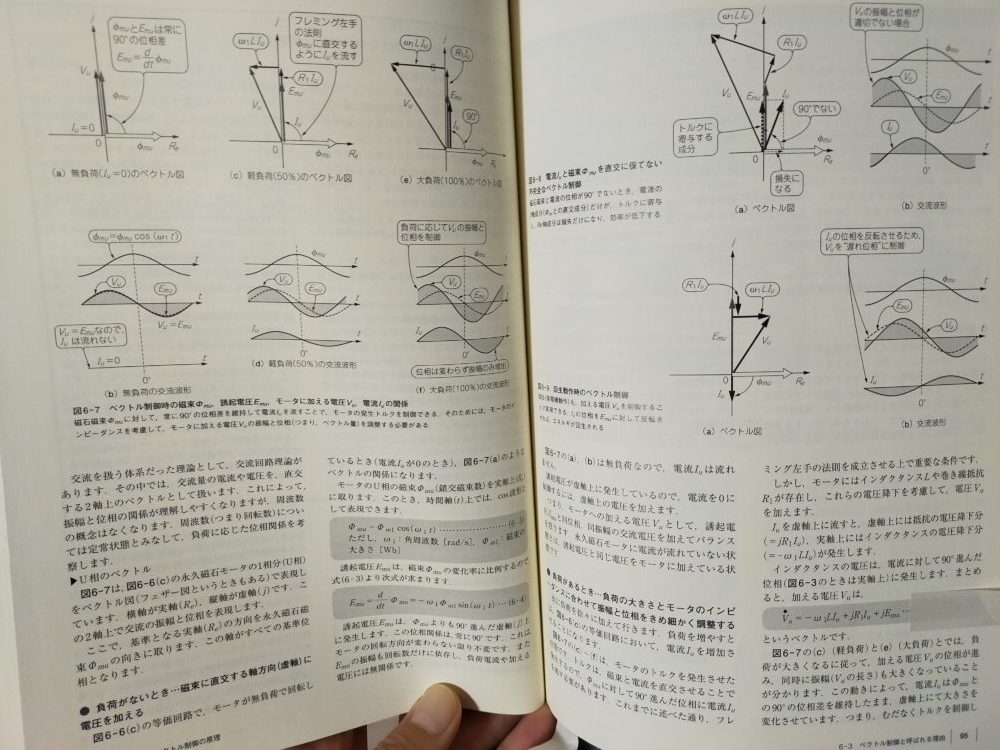
式で言うとページ95。
Vu = -ωLIu + jRI + jE;
ベクトル制御時に、与える電圧はこの図を見て思い出すことができます。
111ページ
デッドタイムについての説明が分かりやすく書いてあります。
インバータは一つの相に対して、正側と負側の2つのパワー素子があります。
ドライバ回路を介してこれらの素子を交互にオンオフさせます。
理想的には一方の素子がオフになると同時に、もう一方の素子がオンすべきです。
通常のパワー素子は、オンにかかる時間よりもオフにかかる時間のほうが長いので
(一瞬でスパッとオフしない)、同時に切り替えると上下素子が短絡して、過電流や素子破壊を引き起こします。
なるほど、オンとオフにかかる時間が違うんですね。
MOSをオフにするときにかかる時間のが長いので、それが原因で短絡する。これがデッドオフ時間を作らなければいけない理由なのですね。
MOSをスイッチングする時に発生するリンギングの時間について書いてあります。
160ページ引用
1シャント抵抗方式を実現するには、シャント抵抗を流れる電流の通電幅を確保する必要があることを説明しました。
制約条件のひとつはデッドタイム期間であり、この値以上の通電幅が必要になります。
もう一つは、スイッチングに伴うリンギング期間です。
これは実測しないと分かりませんが、5から20マイクロsec程度必要になる場合があります。
リンギング電流はモータへの配線の長さなどでも変化します。
電流読んだり、逆起電力をAD変換で求める時、
MOSをスイッチングした直後では上手く測れないという問題があります。
その理由の一つとしては、デッドタイムの期間があること。2つ目に、リンギングが発生すること。
それからリンギングについては156ページにも書いてありました。
デッドタイムは数マイクロsecです。リンギング期間はモータの配線ケーブルが長いほど激しく継続する傾向にありますが、実測しないと分かりません。
これらのデッドタイムやリンギング期間中は電流を検出できません。
検出すると大きな誤差を含みます
リンギング現象とは、
スイッチングに伴う電流波形の減衰振動のこと。
デッドタイムは2マイクロsec, そしてリンギングについては実測が必要。
ということで、机上の理論的な考えだけではわからない。結局は、実機を使って実践してやってみないとわからない。ここがモータ制御の難しいところですね。
センサレス制御でロータの位置を検出する推定する方法としてインダクタンスの変化を検出する方法があります。
それについて181ページに書いてあります。

ただし、突極性のないSPM、突極性のあるIPMで違う。
SPMは、回転子の表面に永久磁石を貼り付けた機構。これは突極性がない。
IPMは、回転子の鉄心の中に磁石を埋め込んだ構造。これは突極性がある。
で、インダクタンスを利用してロータの位置を推定するには、
突極性のあるIPMの場合にできる
ということです。
これについての図は182ページが参考になります。
SPMの場合、d軸インダクタンスの測定と、回転子を90°動かしたq軸インダクタンスの測定では、単相交流により生じる交番磁界の磁気回路には変化が起こらず、インダクタンスの差は生じません。
それに対して、一方の IPM について、突極性のあるモータ IPM の場合は、d軸とq軸で磁気回路が異なります。
d軸インダクタンスの測定時には、交番磁界上に永久磁石が存在します。
q軸の場合には、交番磁界上には鉄心しか存在しません。
永久磁石はそれ自体の透磁率は低く、ほぼ空気と同等です。
交番磁界の経路上に大きなギャップがあるのでインダクタンス値が低下します。
磁気回路上は鉄心が支配的になりシート、Θiが大きくなります。
結果的にLq>Ld の突極性が生じます
[quads id=2]
まとめ
「高トルク&高速応答センサレスモータ制御技術」
は、モーター制御のノウハウがぎっしり詰まっています。
120°通電センサレス制御、
そして、ベクトル制御。
これらの制御をマイコンで行う方は絶対に読んでおいた方が良いでしょう。
制御のやり方にはいろんな制御の仕方があるっていうことにも気が付けます。
【関連記事】
センサレスベクトル制御のメリット・デメリットは?実務に使える専門書「ACドライブシステムのセンサレスベクトル制御」
コメント