ハル– Author –
-
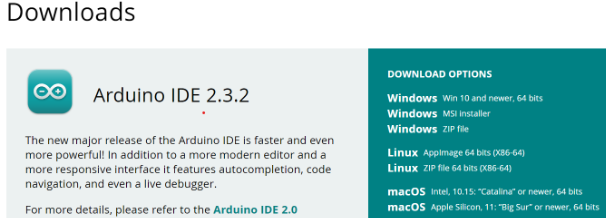
Arduino UNO R4 Minimaを動かす開発環境をPCに初期設定する方法
Arduino UNO R4 Minimaを使い始めるためには、まずPCに開発環境を設定する必要があります。この記事では、その手順を詳しく説明します。実際に私が行った内容をキャプチャで説明します。2024年7月27日実施。 1. Arduino IDEのインストール 最初に、Arduino... -

スマホとICレコーダを接続してYouTube音声をICレコーダに録音する方法
スマホで再生したYouTubeの音声をICレコーダーに録音する方法について、詳しく説明します。ICレコーダーがPCM録音に対応していない場合でも、スマホの音声を録音する方法を紹介します。 必要な機材 スマホ ICレコーダー(外部入力端子またはマイク入力端子... -
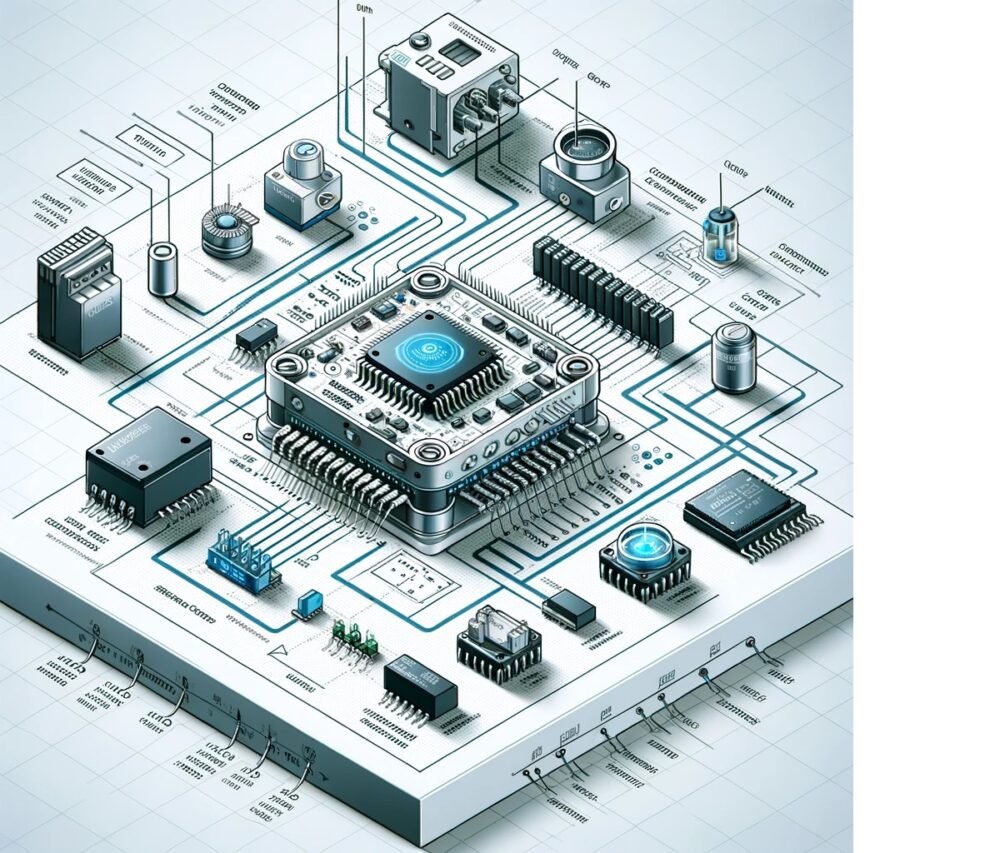
LVDT(直線変位測定)のシステム構成と動作内容や目的を教えてください
LVDT(Linear Variable Differential Transformer)は、高精度な直線変位測定に使用されるセンサーです。本記事では、LVDTのシステム構成、動作の流れ、目的、そして含まれている機能について詳しく説明します。 LVDTシステムの構成 LVDTシステムは、以下... -
回路の絶縁の話で出てきた二直とは何か?一直という用語もあるのか?
絶縁回路の話の中で「にちょく」という用語が出てきました。 何のことやら意味が分からなかったので、調べました。 下記は、ChatGPT4Oによる回答です。 「二直(にちょく)」とは、電気回路や電子機器の絶縁に関する用語であり、英語では「Double Insulati... -

オペアンプの入力オフセット電圧(Input Offset Voltage)が0に近いとは?ゼロドリフトも
入力オフセット電圧(Input Offset Voltage)とは、オペアンプの反転入力端子(-)と非反転入力端子(+)の間に存在する小さな電圧差のことを指します。この電圧差がない理想的なオペアンプでは、両端子間に電圧差がゼロのときに出力電圧もゼロになるはず... -
アナログ回路に詳しい人材は需要に対して相対的に少ない?大学の工学部行かず社会人から勉強してもカバーできる?
組み込みエンジニアになって20年以上たちました。ハードウェアより、どちらかというとファームウェア(ソフトウェア)の開発を主にやってきた組み込みエンジニアです。 でも歳を取り、経験値が高くなるにつれ、組み込みエンジニアってハードウェアもソフ... -

日本人の組み込みエンジニアは皆さん英語は得意ですか?そこそこでも英語できれば重宝される?
組み込みエンジニアになって20年以上です。実験室にこもって作業するような業務も20年程度続けてきました。 最新は、テクニカルマーケティングのような業務を担当するようになって、ちょっとだけ営業よりの仕事になりました。営業にちょっと近い業務に... -
高卒でも組み込みエンジニアになれる?アメリカやヨーロッパなど世界でも働けるのか?
高卒だと何かと、ひけを感じる方もいると思います。特に、組み込み系エンジニアの場合、理工学系の大学、大学院を卒業している人が多いです。 私は文系出身なので、組み込みエンジニアとして20年以上業務をやってきましたが、いまだに気持ちだけは学歴コ... -
個人のKPI(MBO)が設定が不公平過ぎて怒り心頭なので愚痴を書いてやる
会社勤めしていると個人の目標設定が1年ごとに設定される人も多いと思います。KPIとかMBOという言い方をする会社もあるでしょう。 今日は、個人に課されたKPI設定が同僚と不公平で、怒り心頭なので、怒りに任せてここにブログ記事を書きます。怒りに任せ... -
GaN-FETのVgssはIGBTのGgeと同じ意味?ソース(Source)とエミッター(Emitter) の違いも説明
GaN FETとIGBT。ごちゃ混ぜの会話が仕事でなされているときに、わからなくなってきたのが下記の区別。 GaN-FETのVgss IGBTのGge これらは、用語は違っても同じ意味なのか? 整理しておきます。 結論をいうと、概ね同じ意味です。 具体的には、両者ともにデ...