組込みシステムのエンジニアとして20年業務経験のあるHARUYAです。
組み込み系の仕事を20年やってきましたが、これまでは現代制御を勉強せずに済みました。
でも最近、モータのサーボ制御とか、現代制御の知識が必要な分野の仕事をするようになりました。
現代制御って、行列式を中心に数式がいっぱい書いてあって、
何がなんだかよくわからないなーって状態。
なので、現代制御の本を読み漁っています。
その一つが「高校数学でマスターする 現代制御とディジタル制御」小坂学博士著。
が書かれた本こちらを手に取りました
本書は、高校数学でマスターする
というのが謳い文句です。
では、実際に初心者向けの本だったかどうか?
私が読んだ感想は、
高校数学が普通に理解できる人であれば、まあまあその通りかも。
現代制御とデジタル制御の基礎を学ぶことができると思います。
一方で私のように、高校では数学が苦手。大学でも特に数学の勉強してこなかった(文系の私)にとっては難しい本でした。
とはいっても、そんな私でも学ぶところはありました。以下書いておきます。
現代制御とデジタル制御系で出てくるキーワードを頭に入れておくきっかけに
本書は、現代制御やデジタル制御で出てくる用語がどういうものか?
っていうのをざっと頭に入るのには役に立ちました。
具体的には、
現代制御については、状態空間表現、安定性、可制御、可観測、オブザーバ。
デジタル制御については、PID制御、伝達関数、オイラーの法則など、、、。
これらの用語については、
他の古典制御や現代制御、あるいはデジタル制御の専門書にも書いている基本的な用語です。
でも、言葉の定義の説明については、本の著者によって微妙に表現が違うものです。
だから、別の本と比較して、用語の定義を頭にしっかり叩き込むきっかけとして役立ちます。
PID制御のワインドアップ、アンチワインドアップ
では、私自身、本書で初めて学んだ用語をピックアップしておきます。私にとっては、あんまり他の本では見かけたことのない用語でした。
本書、3章の「現場の制御技術をわかる」の箇所です。
ワインドアップ
と、
アンチワインドアップ
ページ78~79に書いてあります。
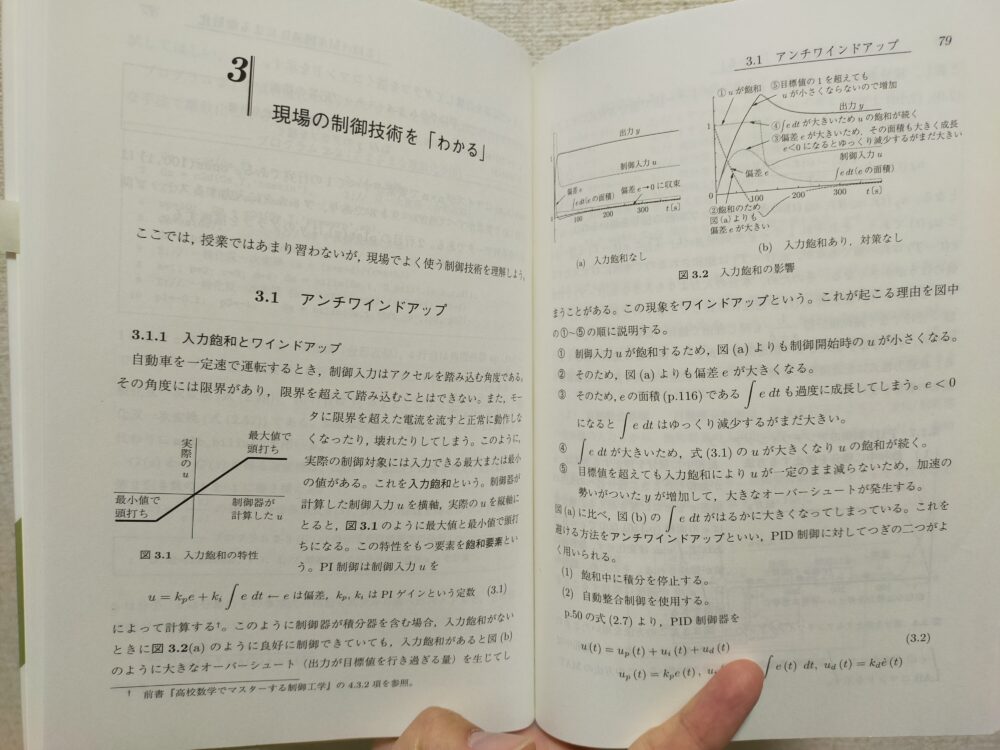
入力飽和があると大きなオーバーシュート(出力が目標値をいきすぎる量)を生じてしまうことがある。
この現象をワインドアップという。
これを避ける方法をアンチワインドアップという。
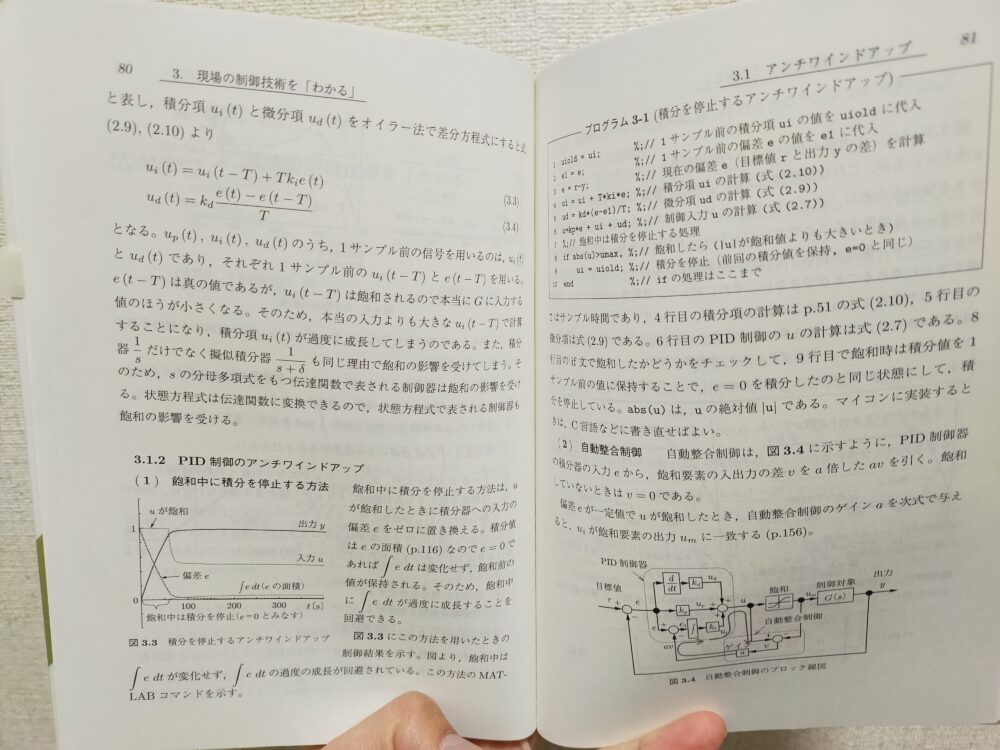
例えば、PID制御のときにワインドアップが発生した場合、2つの対策がある。
1つは、飽和中に積分を停止する。
2つ目は、自動整合制御を使用する。
入力飽和があって、目標値(=1)を超えても入力が小さくならなくて、
出力がオーバーシュートしてしまう説明の図が本書に書いてあります。
現代制御の用語「システム同定」
もう一つ、現代制御のページで覚えた用語が、ページ105。
システム同定。
ページ105の引用
制御対象の入力と出力を計測して、それらを元に制御対象の伝達関数モデルや状態空間モデルを構築することをシステム同定という
ステップ応答による同定方法について、図が載っています。
- 無駄時間 L
- 定常ゲインK
- 時定数 T
についてのイメージが分かります
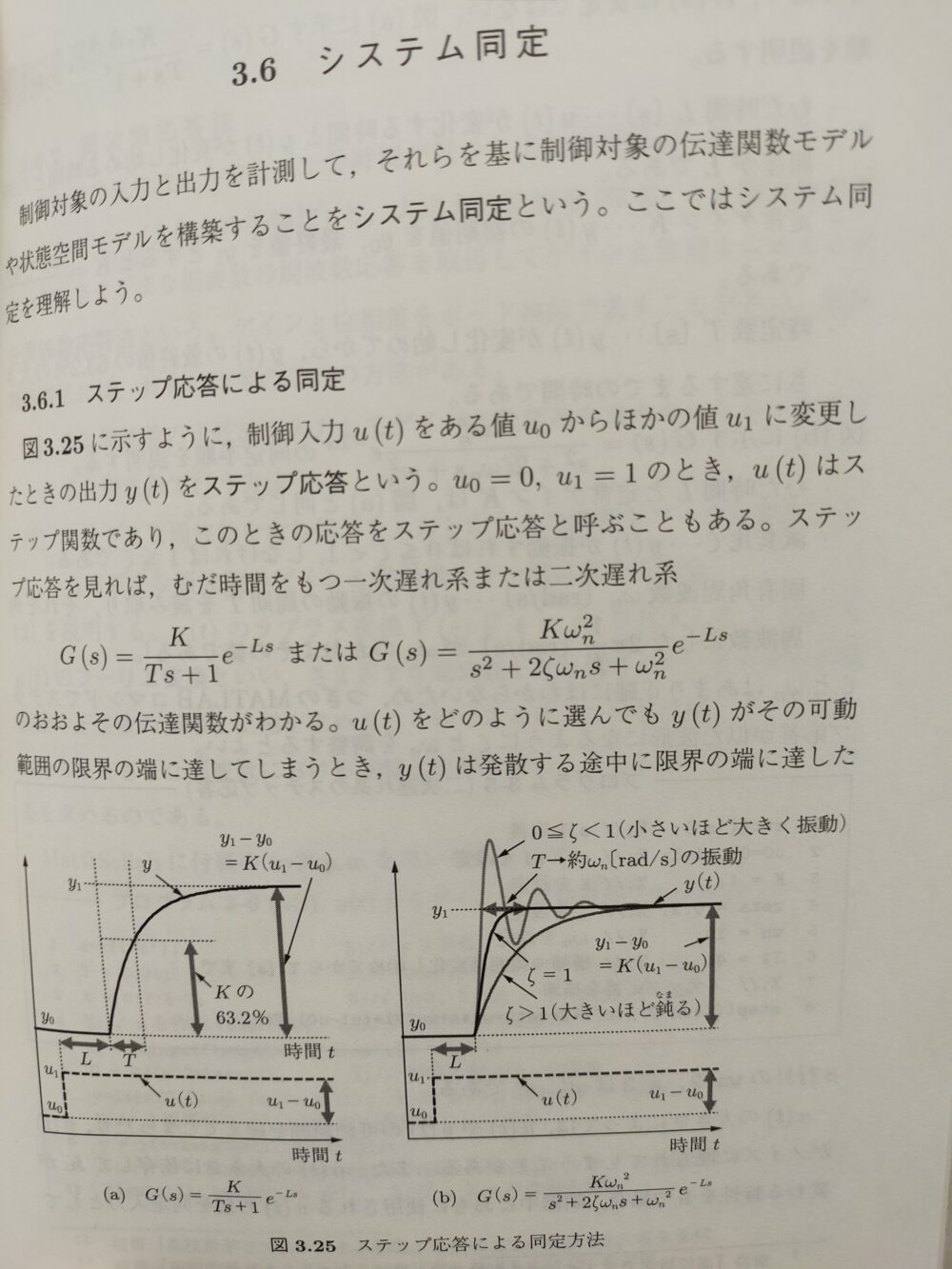
左の図が、1次遅れ系の伝達関数のステップ応答
右の図が、2次遅れ系の伝達関数のステップ応答
[quads id=2]
まとめ
「高校数学でマスターする 現代制御とデジタル制御」
高校数学が得意な人にとっては、本書はもってこいでしょう。
一方で、数学が苦手な人にとっては、用語の定義を覚えておくためにさらっと読むというのが本書の読み方かなと感じました。
本書一冊だけで、現代制御とデジタル制御の全体像をつかむのは難しいので、副読本として読むのがよいです。
P.S
ちなみに、現代制御の本については5冊以上読みましたが、いまのところ一番わかりやすくて初心者向けだなと思ったのは、下記の本です↓
「はじめての現代制御理論」
【この記事を読んでいる人はこちらの記事も読んでいます】
コメント