これまで制御工学系の本を10冊ほど読んできました。
その中で、初心者向けに説明が一番分かりやすかった本をひとつあげるとしたら、
間違いなくこの本です
「制御工学 the ビギニング」
- フィードバック制御
- ブロック線図
- PID制御
- 伝達関数
- 1次遅れ
- 2次遅れ
- 過渡応答
- ナイキスト線図
などのイメージをつかむには間違いなくこの本がお勧めです。
2019年に出版された本。
古典制御の本って、歴史があるから、20年とか30年前に書かれた本を手にすることも珍しくありません。
そんななか、2021年の今から換算して、たった数年前に出版された新しい本。この本の存在をしらない人も多いはずです。
これから制御工学を勉強する方は、最初にこの本を読むことをおすすめします。
著者の西田麻美さんは、株式会社プラチナリンク代表取締役、工学博士(電気通信大学)という経歴を持たれた方。
以下どのようなところが私は役に立ったかメモったかについて書いておきます。
これから読む方のご参考になると思って本ブログに書いておきました
「制御工学 The ビギニング」 は図が大きくて分かりやすい説明
ページ45
トルク制御、速度制御、位置制御の違いが分かりました。
- トルク制御は、電流に比例したトルクを制御
- 速度制御は、速度が一定になるように制御
- 位置制御は、目標位置を一定にさせる制御
〇〇制御って、結局、どうする制御なのか?
っていう用語の定義がよくわかります。

ページ85以降
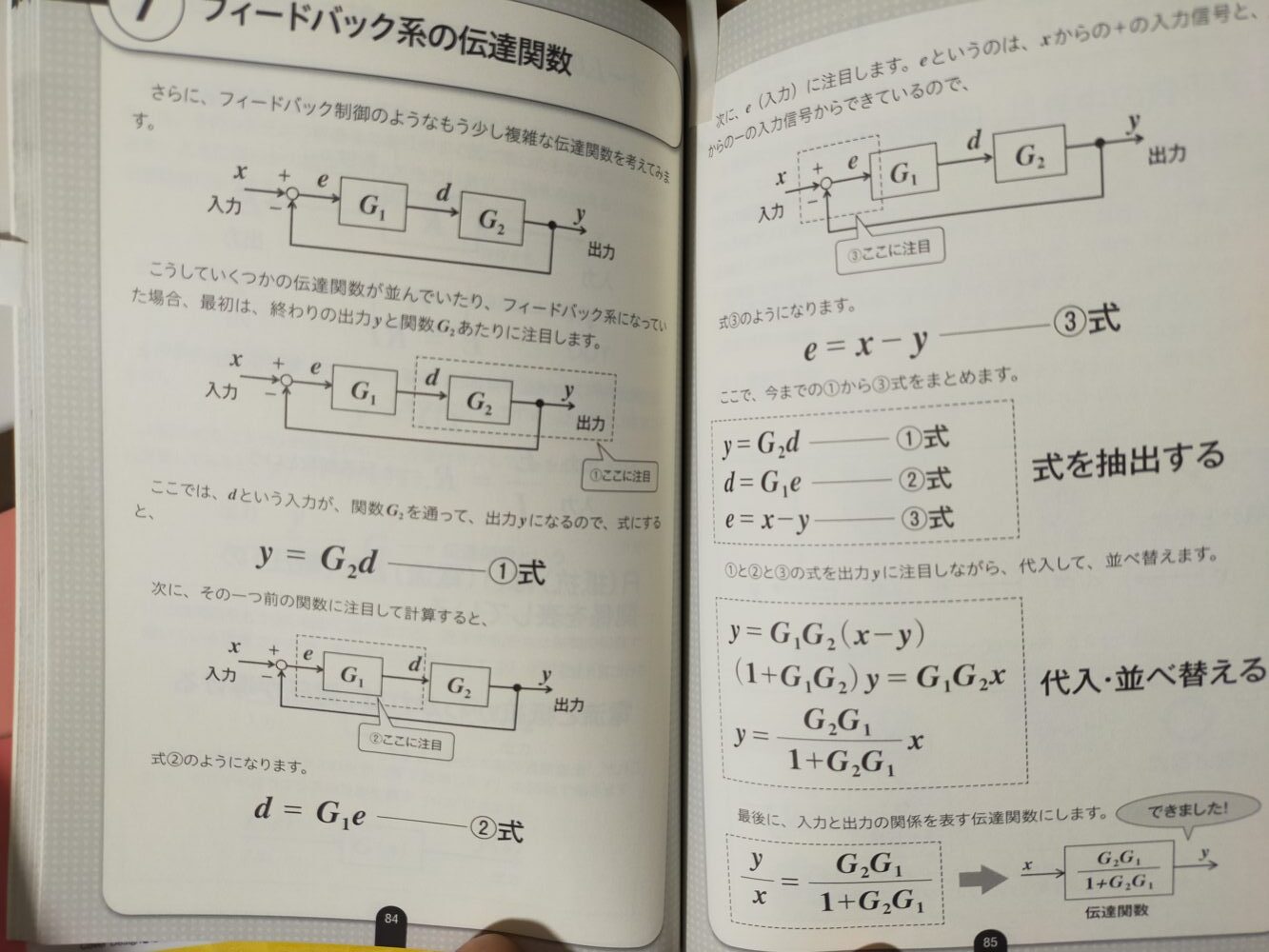
フィードバック系の伝達関数。
最終的に
y/x =G2 G1/ (1+ G2 G1)
の式になる過程が書いてあります。
もし、どうやってこの式が算出されるのか?
を復習する時にはこのページを読むと良いです。
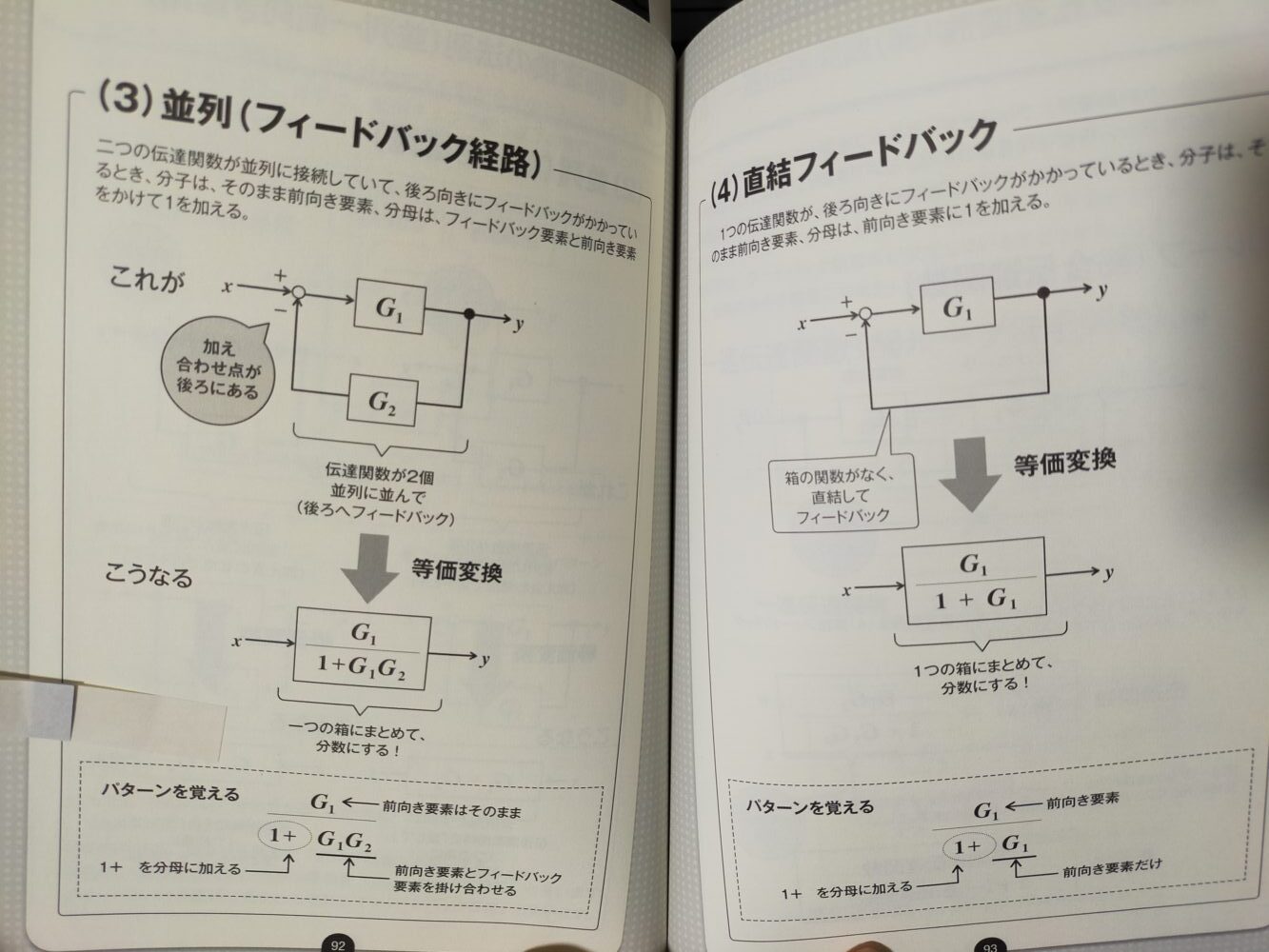
引き続いてページ92ページ
フィードバック経路の並列。
そして直結フィードバックのパターンが書いてあります。
完成式だけを振り返りたければここを見返せばOK.
ページ156
過渡応答は、6つの評価指標に別れる。
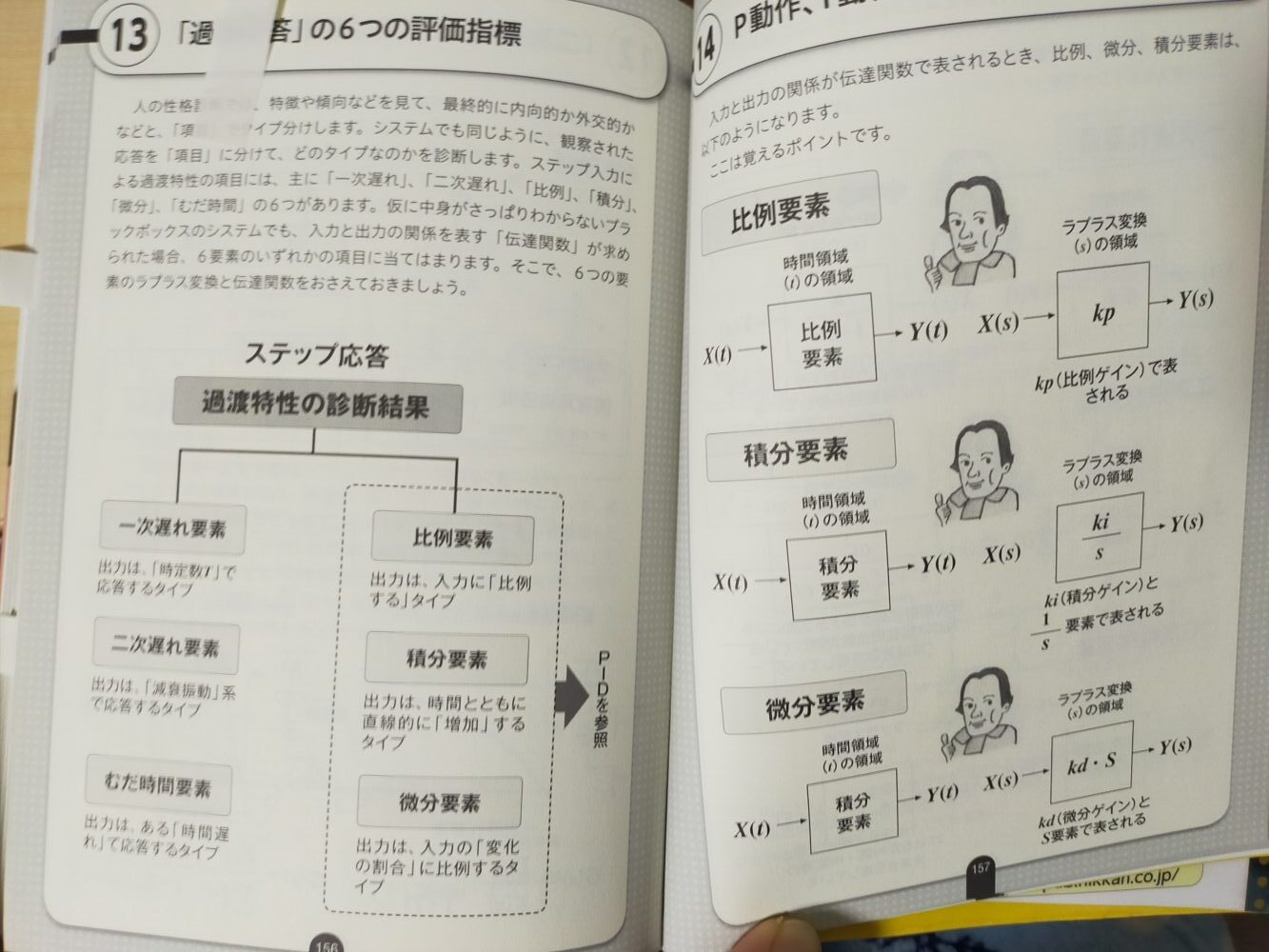
- 一次遅れ要素は、時定数Tで応答
- 2次遅れ要素は、減衰振動系で応答
- むだ時間要素は、時間遅れで応答
- 比例要素は、入力に比例
- 積分要素は、時間とともに直線的に出力が増加
- 微分要素は、入力の変化の割合に比例
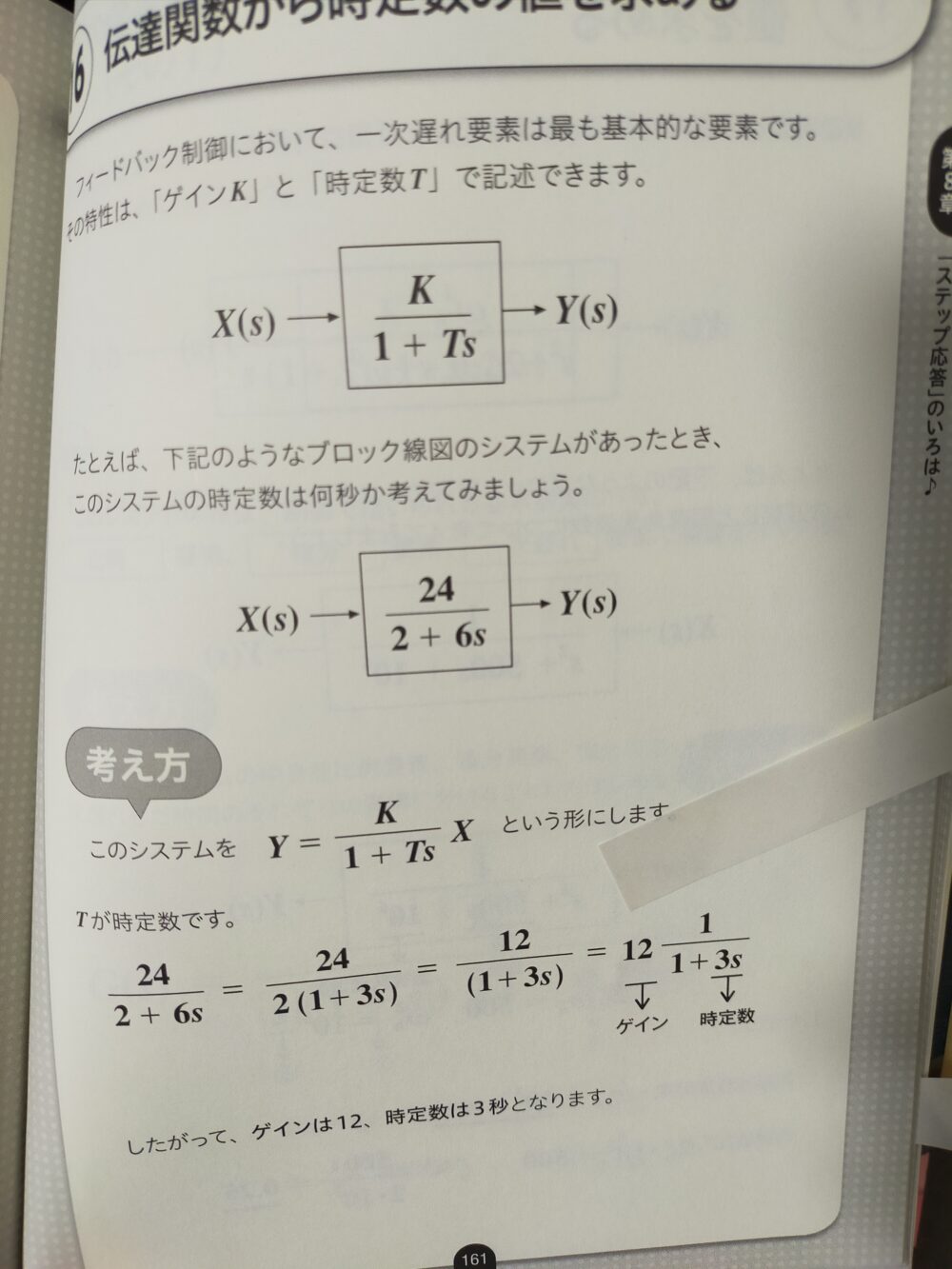
ページ161
伝達関数から時定数の値を求める方法が書いてあります。
フィードバック系の公式の形である、
分母が「1+〇〇」
の形に数式を変形するのがポイント。
ゲインと時定数は、161ページの計算のやり方で求まることが分かります。
同じく、二次遅れ要素については162ページ。
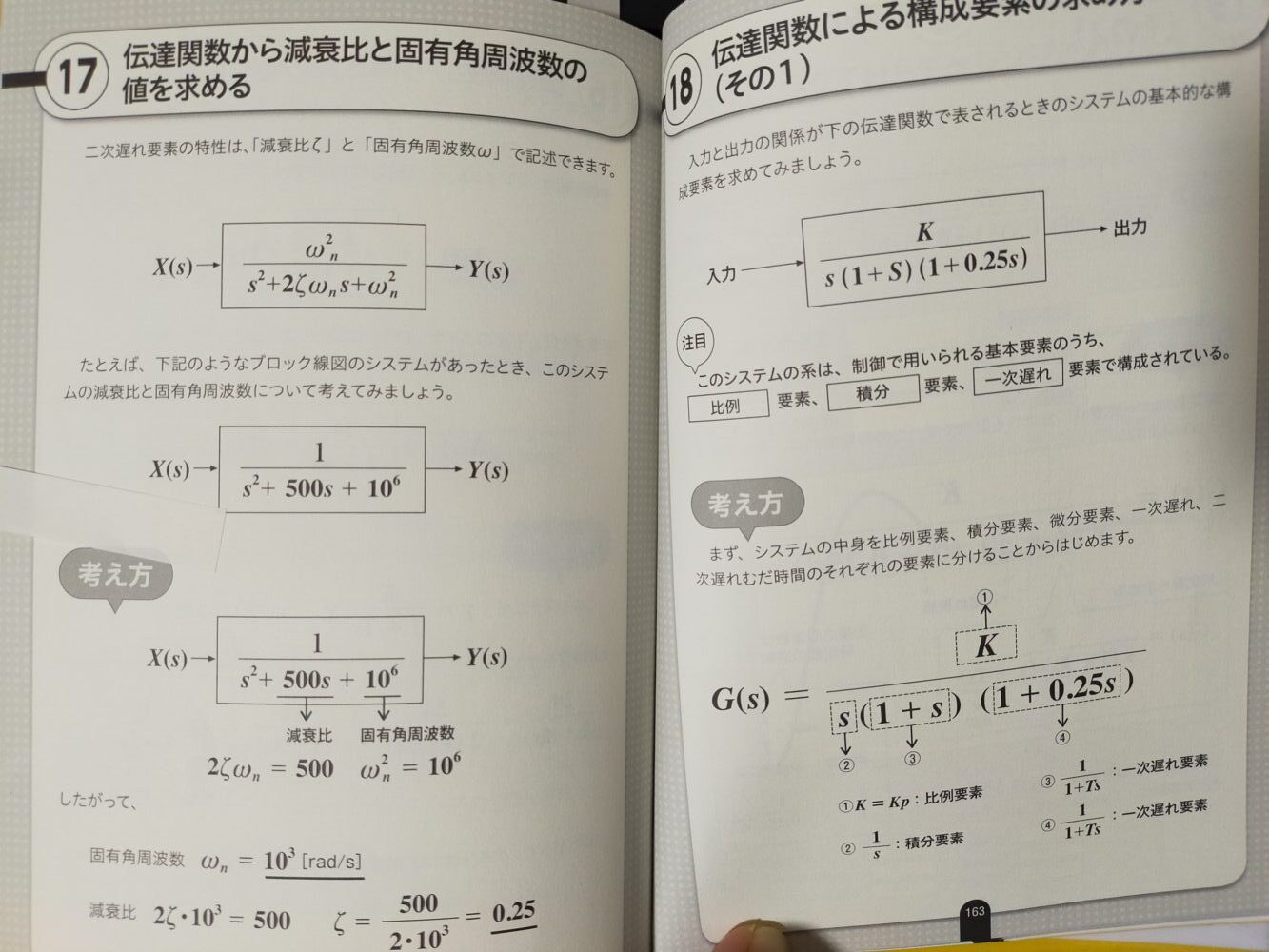
こちらは、減衰比と固有角周波数の公式に当てはめて式を変形。
ページ173.
ボード線図、ナイキスト線図を理解するために、
虚数と複素数平面について理解する必要があります。
その理解の助けになりました。
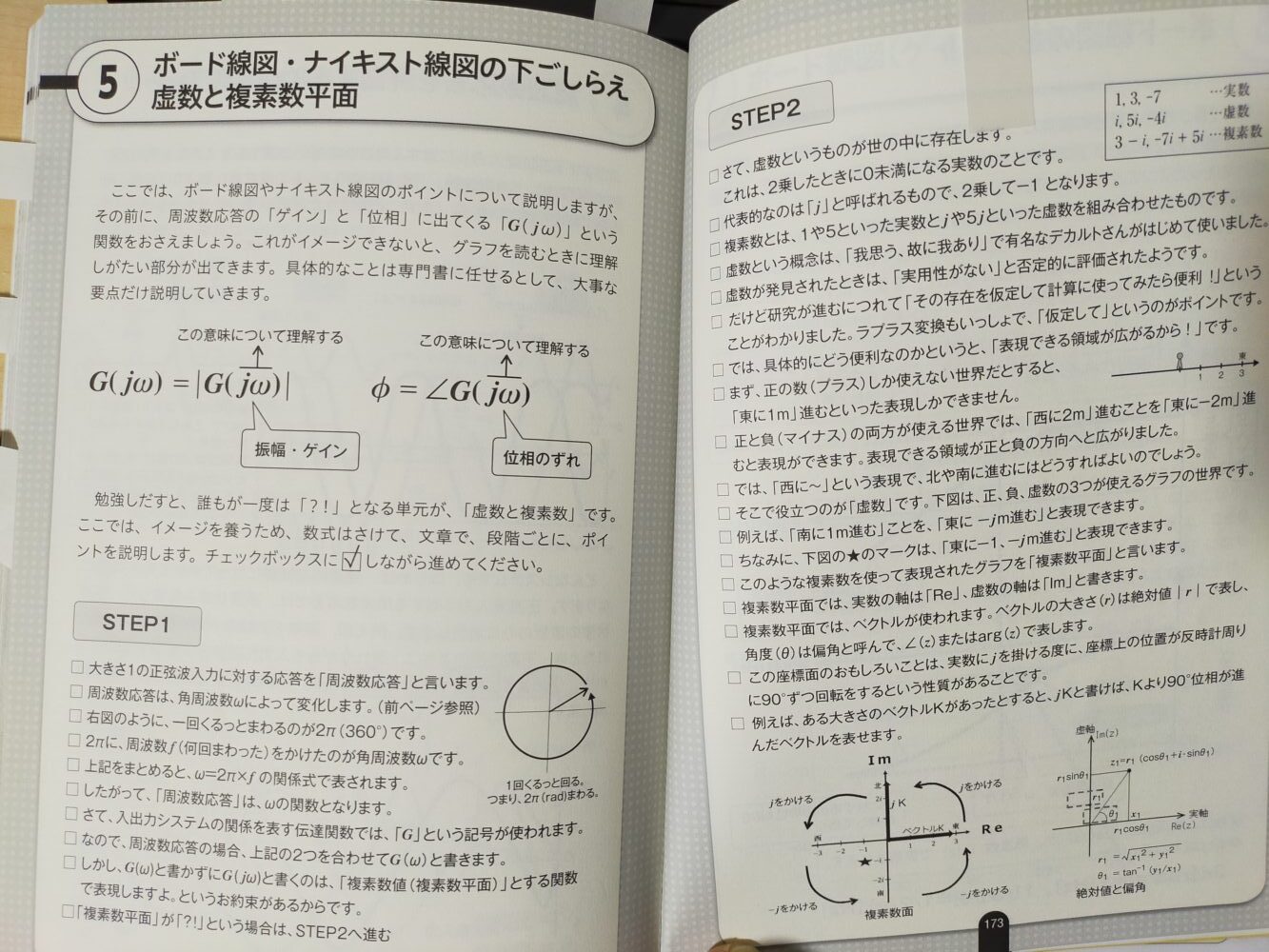
複素平面の考え方が書いてあります。
- ゲイン、つまり振幅は、 G(jω)の絶対値
- 位相のずれは jω。
複素平面の図がイメージしやすいです。
jをかけると、位相が90°進むイメージ。
178ページ、179ページ。
ボード線図の読み方。
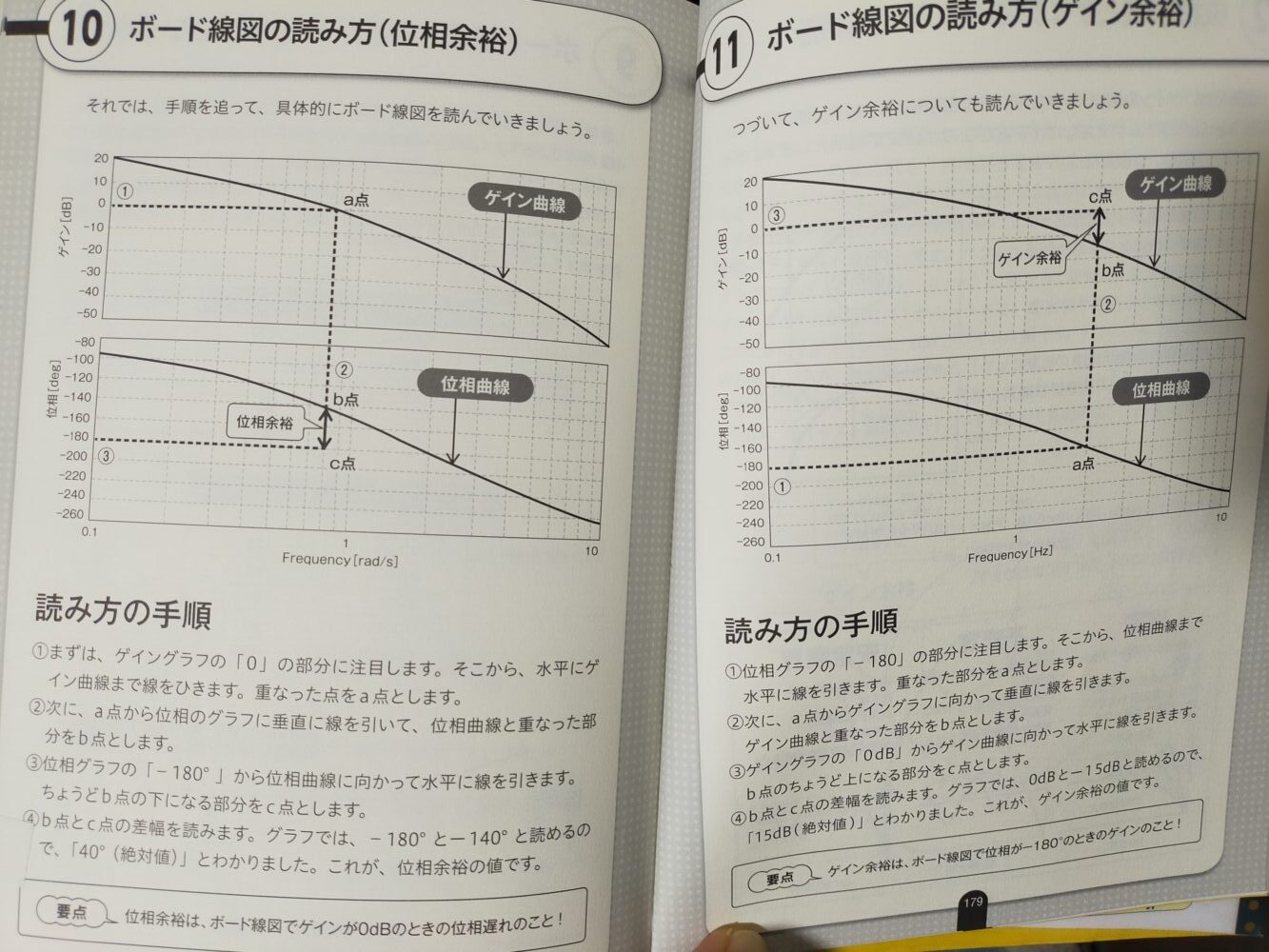
- 位相余裕は、ボード線図でゲインが0デシベルの時の位相遅れのこと
- ゲイン余裕、ボード線図で位相が-180°の時のゲインのこと
この定義を頭に入れておくだけでも、ボード線図を理解するのに超役に立ちます。
そして最後180ページ
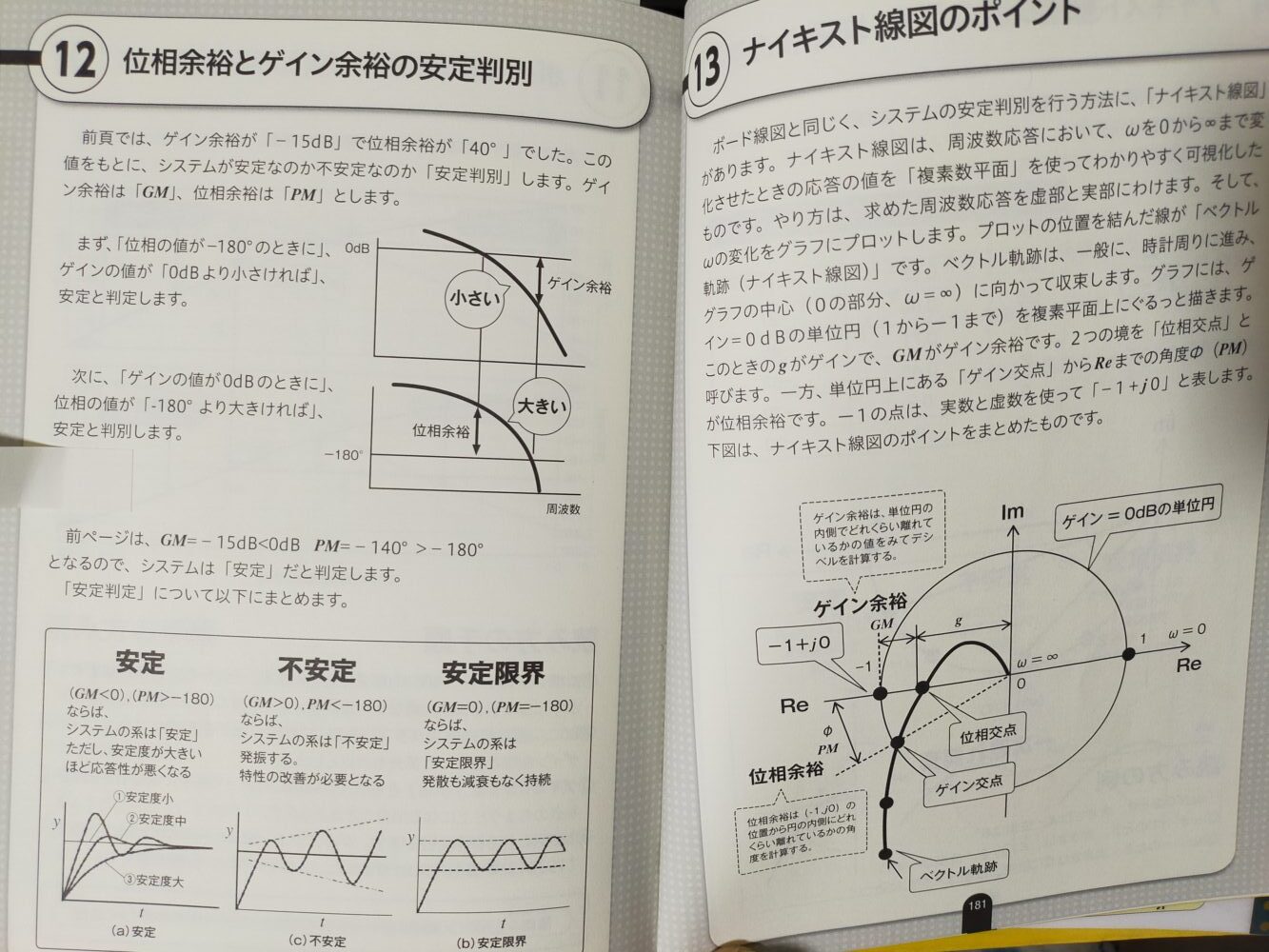
位相余裕とゲイン余裕の安定判別。
安定と判定するのは、
- 位相が-180°の時に、ゲインが0db よりも小さい時
- ゲインが0db の時に位相の値が-180°より大きい時
位相余裕は、-180°より大きくなければ安定にはならないことがポイント。
[quads id=2]
まとめ
「制御工学 the ビギニング」
さきほど、amazonのレビューを見てみました。
レビューが、6つぐらい書いてありましたが、なぜか?なぜか?
レビューの評価が低いです。
なぜか?
その理由が、誤字脱字が多い。
ということでした。
まあ、私も読んだので知っています。確かに、誤字はいくつかありました。
でも、その誤字の多くが、日本語の漢字変換ミスとか、
ちょっと自分で考えれば、
「これは誤字だ!」
って、すぐに分かります。
あるいは、そこまで考えなくても、前後の文脈で分かるでしょー?
って感じの程度の軽い誤字です。
「誤字脱字が多い」からといって、
本書を読まない理由にはなりません。
制御工学の初心者であれば、誤字脱字は差っ引いて、さらっとでもいいから絶対に読むべき本です。
間違いないです ↓
コメント