Field-Oriented Control(FOC)において、空間ベクトル変換(または空間ベクトル変調)は通常、三相モーターの各相に印加される電圧または電流を、線形独立な二次元座標(通常は座標)にマッピングする手法を指します。この変換によって、三相ACモーターは効率的にかつ高精度に制御できます。
空間ベクトル変換には主に以下のステップがあります。
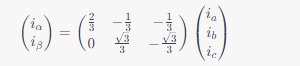
クラーク変換
最初に、三相(a, b, c)の電流(または電圧)を二次元の座標系()に変換します。このステップはクラーク変換と呼ばれます。
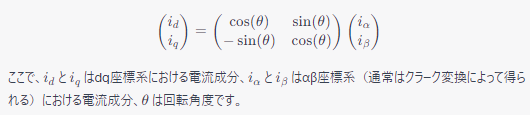
パーク変換
次に、座標系から座標系へ変換します。このステップはパーク変換と呼ばれ、モーターの回転角度を考慮に入れます。
[quads id=2]
制御と逆変換
座標系では、直流モーターのようにモーターを制御できます。制御後、必要ならば逆パーク変換と逆クラーク変換を用いて、新しい三相電流または電圧に変換できます。
これらの変換は、磁場の方向とモーター電流を直接制御できるようにするために用います。具体的には、軸制御によってモーターの磁場(磁束)を制御し、軸制御によってトルクを制御します。
空間ベクトル変換はFOCの要であり、より効率的で精密なモータ制御を実現します
コメント